ここから「力学」の本題に入っていきます。
ニュートンが$1687$年に「Principia (プリンキピア)」で発表し、彼が「力学」の分野を体系立てた内容になります。
「ニュートン力学」の基礎となる $3$ つの法則があります。
第$1$法則は「慣性の法則」です。
力の種類のところでも少し扱いましたが、全ての物体には「慣性」があります。
つまり、「運動状態の変化 (具体的には速度 $\vec{v}$ の変化) がなければその状態を維持する」という法則になります。
第$2$法則は「 $m\vec{a}=\vec{F}$ 」で、所謂「運動方程式」です。
力学での現象はこの式で表されます。
更に、この式は「 $\vec{a}=\vec{0}$ 」の状態、即ち「慣性の法則」も含んでいます。
第$3$法則は「作用・反作用の法則」です。
$2$ 物体の間に作用する力に関する法則で、
「$2$ つの物体の間に作用する力は、それらを結ぶ直線上に作用し、その大きさは等しく、方向は反対向きである」になります。
それでは、各法則について詳しく説明していきましょう。
慣性の法則
第$1$法則の「慣性の法則」についてです。
「慣性」とは「物体が常に現在の状態を保とうとする性質」を指します。
ガリレイ以前の物理にはこの様な考え方は無く、現代から見ると様々な誤解や間違いを含んでいました。
例として、「軽いものはゆっくり落ちる」や「何もしなければやがて物体は止まる」などと言った間違いです。
「鉄球と羽を同時に落とす」と現象としては「羽の方がゆっくり落ちる」でしょうし、「床の上を物体を滑らせる」と「物体はいつかは止まる」現象を見ることができます。
現象だけをそのまま見ると一見正しいように感じられます。
つまり、物体に「何もしていない状態」だと誤解していた訳です。
しかし、実際は「物体に作用している力 (空気抵抗・床面との摩擦)」が存在していたことになります。
この様な「作用している力」が完全に無い状態であれば「現在の運動状態 (速度 $\vec{v}$)」を保つことになります。
従って、「物体に力が働いていない、或いは働いていてもつり合っている状態 (合力 $\sum \vec{F}=\vec{0}$ ) であるならば、現在の運動状態 (速度 $\vec{v}$ ) を保つ」と言うことができます。
この法則では「作用する力に着目する」ことが重要です。
運動方程式
「慣性の法則」では「物体に力が働いていない、或いは働いていてもつり合っている状態」の場合について述べられています。
では、これが「崩れた場合 (力が作用した場合) にどうなるか?」について記述したものが「運動方程式」になります。「力学」の運動は全てこの式に従って行われています。
運動方程式は
$$
\begin{aligned}
m\vec{a}=\vec{F}
\end{aligned}
$$
で表されます。(ここでの $\vec{F}$ は合力を意味する)
この関係から「質量 $m=1\ \text{kg}$ の物体に $a=1\ \text{m/s}^2$ の加速度を与える力を $F=1\ \text{N}$ (ニュートン)」と定義しています。
運動方程式の右辺に「$\vec{F}$」と記述しましたが、作用する力は$1$つだけとは限りません。
作用する全ての力の和 ($\vec{F_1}+\vec{F_2}+\vec{F_3} \cdots$) を記述する必要があります。
$$
\begin{aligned}
m\vec{a}=\sum\vec{F}
\end{aligned}
$$
従って、力の漏れがあると正しい運動方程式が記述できないことになるので、前章の「力の探す手順」が重要になってくる訳です。
また、この式において加速度 $\vec{a}$ と力 $\vec{F}$ は「ベクトル量」であることも重要なポイントです。
$3$次元空間を想定し、位置ベクトルを $\vec{r}=(x,y,z)$ とすると速度 $\vec{v}$ は
$$
\begin{aligned}
\vec{v}=\frac{\diff \vec{r}}{\diff t} = \left(\frac{\diff x}{\diff t}, \frac{\diff y}{\diff t}, \frac{\diff z}{\diff t}\right)
\end{aligned}
$$
となります。
更に、加速度 $\vec{a}$ は
$$
\begin{aligned}
\vec{a}=\frac{\diff \vec{v}}{\diff t} &= \left(\frac{\diff v_x}{\diff t}, \frac{\diff v_y}{\diff t}, \frac{\diff v_z}{\diff t}\right) \\
\\
&= \left(\frac{\diff }{\diff t}\left(\frac{\diff x}{\diff t} \right), \frac{\diff }{\diff t}\left(\frac{\diff y}{\diff t} \right),
\frac{\diff }{\diff t}\left(\frac{\diff z}{\diff t} \right)\right) \\
\\
&= \left(\frac{\diff^2 x}{\diff t^2}, \frac{\diff^2 y}{\diff t^2}, \frac{\diff^2 z}{\diff t^2}\right) \\
\end{aligned}
$$
と表されます。
従って、運動方程式 $m\vec{a}=\vec{F}$ は
$$
\begin{aligned}
m
\left(
\begin{array}{c}
\displaystyle \frac{\diff v_x}{\diff t} \\
\displaystyle \frac{\diff v_y}{\diff t} \\
\displaystyle \frac{\diff v_z}{\diff t}
\end{array}
\right) =
\left(
\begin{array}{c}
F_x \\
F_y \\
F_z
\end{array}
\right)
\end{aligned}
$$
即ち
$$
\begin{aligned}
m\frac{\diff v_x}{\diff t} =F_x \ ,\quad
m\frac{\diff v_y}{\diff t} =F_y \ ,\quad
m\frac{\diff v_z}{\diff t} =F_z
\end{aligned}
$$
と表されます。
或いは
$$
\begin{aligned}
m
\left(
\begin{array}{c}
\displaystyle \frac{\diff^2 x}{\diff t^2} \\
\displaystyle \frac{\diff^2 y}{\diff t^2} \\
\displaystyle \frac{\diff^2 z}{\diff t^2}
\end{array}
\right) =
\left(
\begin{array}{c}
F_x \\
F_y \\
F_z
\end{array}
\right)
\end{aligned}
$$
即ち
$$
\begin{aligned}
m\frac{\diff^2 x}{\diff t^2} =F_x \ ,\quad
m\frac{\diff^2 y}{\diff t^2} =F_y \ ,\quad
m\frac{\diff^2 z}{\diff t^2} =F_z
\end{aligned}
$$
と表され、「各成分毎に運動方程式を立てれば良い」ことになります。
「力」の物理量としての次元を考えると
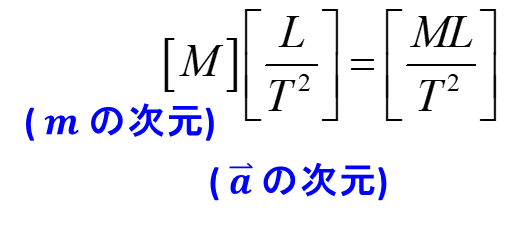
となります。
力の単位は「 $\text{N}$ (ニュートン) 」で表します。「 $\text{N}$ 」の中身は「 $\text{N}=\text{kg m/s}^2$ 」となります。
別に覚えなくても「質量 $\text{kg}$ 」と「加速度 $\text{m/s}^2$ 」の積ですからすぐに導けます。
注)
ここで注意ポイントを挙げておきます。
「質量」と「重さ」について普段は区別して利用していないかも知れませんが、物理では区別が必要になります。
「質量」とは「慣性の大きさを表す量」になります。普段、「質量」と呼んでいるのは「慣性質量」を指しています。この物理量は言い換えると「物体の動き難さの度合いを表す量」で、「スカラー量」です。
それに対して、「重さ」というのは「物体に働く重力」になります。
これは「力」なので「ベクトル量」となります。
従って、「質量」はどこでも、例えば月などに行っても同じ値になります。一方、「重さ」は場所によって変化します。地上と月面は「重力 (万有引力) 」が異なるため、「重さ」も異なる値になります。
この様に「質量」と「重さ」は別物であると意識しておくことは重要です。
作用・反作用の法則
作用・反作用の法則は、「力」が作用したとき、その「力」と「逆向きに同じ大きさの力が同一直線上に作用する (反作用)」になります。
簡単なモデルを使って確認してみましょう。
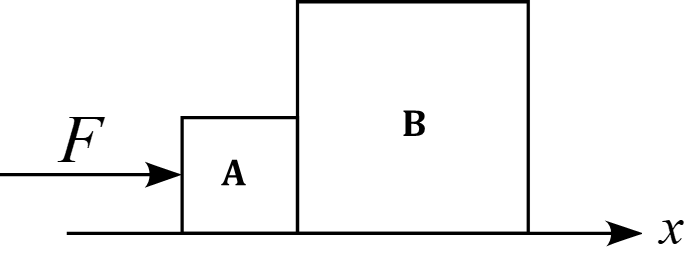
$2$つの物体が接している状態の物体 $A,B$ があるとします。
話を単純にするため、床との摩擦力は無視するとし、$x$ 軸方向のみ考えるとします。
左側から力 $F$ を加えたところ、物体 $A,B$ が一緒に右に運動したとします。
この時、物体 $A,B$ が接している面では力が働き、「作用反作用の関係」になります。
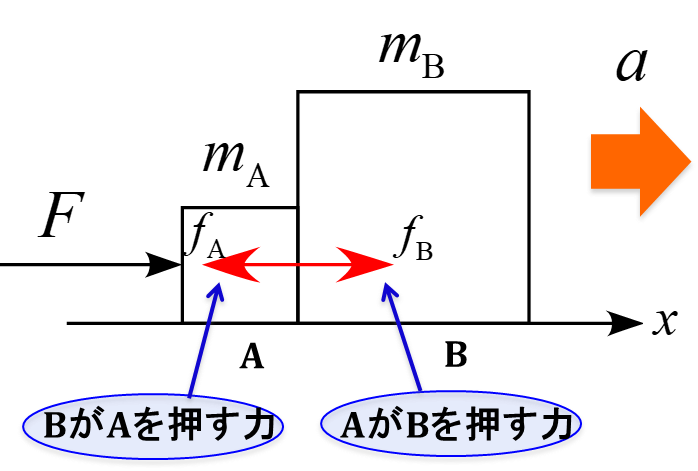
この運動について運動方程式を考えてみましょう。
物体 $A$ に着目すると、$x$ 軸方向に作用する力は「左から推す力 $F$ 」と「物体 $B$ との接地面から受ける力 $f_A$ 」なので、作図は
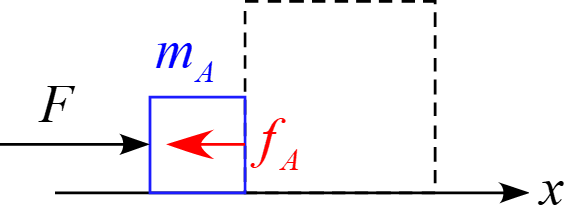
となります。
よって運動方程式は
$$
\begin{aligned}
m_A\ a =F-f_A
\end{aligned}
$$
と表されます。
運動方程式の右辺は軸を右向き正に設定しているので「$F$ は正、$f_A$ は負」で記述する。
物体 $B$ に着目すると、$x$ 軸方向に作用する力は「物体 $B$ との接地面から受ける力 $f_B$ 」なので、作図は
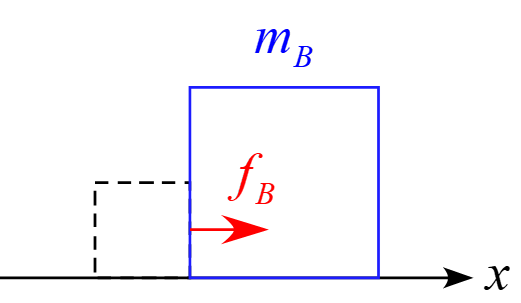
となります。
よって運動方程式は
$$
\begin{aligned}
m_B\ a =f_B
\end{aligned}
$$
と表されます。
この2式を合わせると
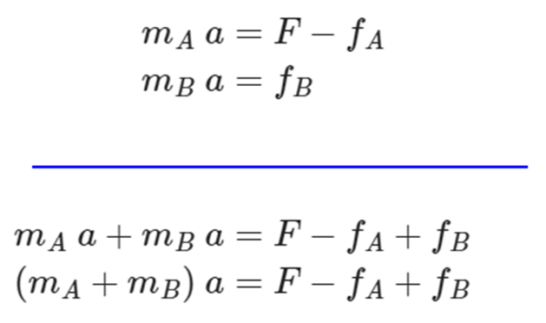
と表されます。
一方、別の見方として「物体 $A,B$ は一体となって運動している」ので「物体 $A,B$ 全体を塊として考える」と、作図は
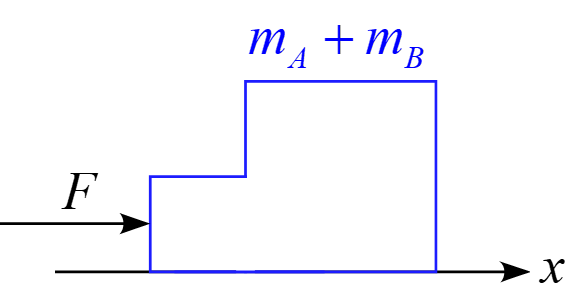
となります。
よって運動方程式は
$$
\begin{aligned}
(m_A+m_B)\ a =F
\end{aligned}
$$
と表されます。
物体 $A,B$ が分離していると見て、それぞれの式を合わせた式
$$
\begin{aligned}
(m_A+m_B)\ a =F - f_A + f_B
\end{aligned}
$$
と物体 $A,B$ が一体と見た式
$$
\begin{aligned}
(m_A+m_B)\ a =F
\end{aligned}
$$
は同じ現象を表す式なので、数学的にも同じ出なければならず。それぞれの式の右辺に着目すると
$$
\begin{aligned}
F &=F -f_A + f_B \\
\\
f_A &=f_B
\end{aligned}
$$
となります。
従って、$f_A$ と $f_B$ は大きさが等しく、互いに逆向きであり、別々の物体に作用する (作用・反作用の法則)。
次は「ニュートンの運動法則」の実用的な使用方法について説明します。
次に読む:基本モデルと運動方程式 , さまざまな力が作用するモデル