慣性力が作用するモデル
ここでは「慣性力」の扱い方について扱います。
「慣性力」を扱う場合は軸の設定に注意が必要になります。
「乗り物の内 (並進座標系)」と「乗り物の外 (慣性座標系)」の$2$つの座標系について考えます。
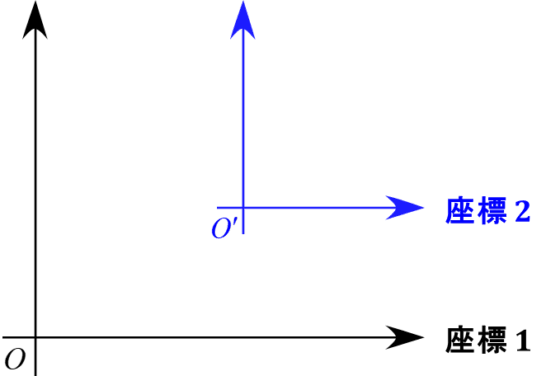
「静止している座標系 (慣性座標系)」を「座標 $1$ (図の黒)」とし、「慣性系に対して動いている (加速度運動 $\vec{a}$ )座標系 (並進座標系) 」を「座標 $2$ (図の青)」と設定します。
「慣性座標系」とは、等速直線運動をしている座標系を含む、ニュートンの運動方程式がそのまま成立する座標系になります。
「並進座標系」において、ここでは回転を考えないとします。
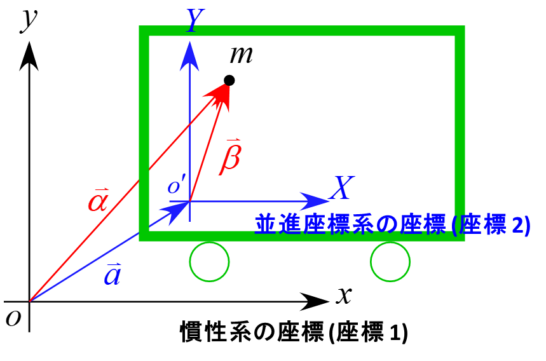
「座標 $2$」内に質量 $m$ の物体があるとします。
このとき、「座標 $1$」から見た物体の加速度を $\vec{\alpha}$ とし、「座標 $2$」からみた物体の加速度を $\vec{\beta}$ とします。
また、「座標 $2$ 」は「座標 $1$」から見て加速度 $\vec{a}$ で運動しているとします。
乗り物で言い換えると、「車外からみた加速度 $\vec{\alpha}$ 」、「車内での加速度 $\vec{\beta}$ 」、「「列車自体の加速度 $\vec{a}$ 」になります。
これらを図に表すと
ここで、$3$ つの加速度関係は $3$ つのベクトルを抜き出して作図すると
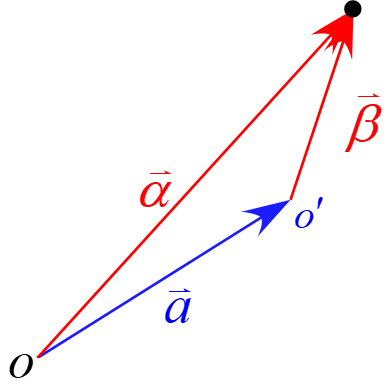
となります。
従って $3$ つのベクトルには
$$
\begin{aligned}
\vec{\alpha} = \vec{a} + \vec{\beta}
\end{aligned}
$$
の関係があります。
物体の「絶対加速度 $\vec{\alpha}$ 」は「座標系の加速度 $\vec{a}$ 」と「座標系内での相対加速度 $\vec{\beta}$ 」の和になります。
ここで、物体に力 $\vec{F}$ が作用していたとし、「座標 $1$ (車外)」から見た運動方程式を立てると「車外からみた加速度 $\vec{\alpha}$ 」なので
$$
\begin{aligned}
m \vec{\alpha} = \vec{F}
\end{aligned}
$$
となります。
ここで、前述のベクトルの関係「 $\vec{\alpha} = \vec{a} + \vec{\beta}$ 」を代入すると
$$
\begin{aligned}
m \left( \vec{a} + \vec{\beta} \right) &= \vec{F} \\
\\
m \vec{a} + m \vec{\beta} &= \vec{F} \\
\\
m \vec{\beta} &= \vec{F} - m \vec{a}
\end{aligned}
$$
と表されます。
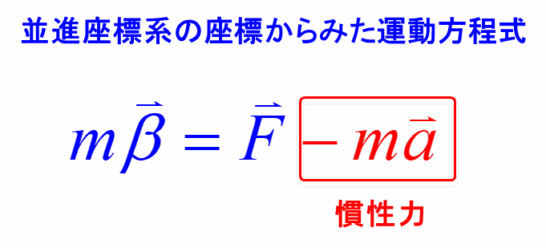
この結果の式は「物体の加速度が $\vec{\beta}$ 」で 「物体に作用する力が $\vec{F} - m \vec{a}$ 」であると解釈できます。
これは「車内である座標 $2$ から見た運動方程式」を意味しています。
この式を見ると、元々物体に作用している力 $\vec{F}$ のほかに「 $- m \vec{a}$ 」という項があります。
この項が「慣性力」に相当します。
つまり、「慣性力 $-m \vec{a}$ 」は「(物体の質量 $m$ ) $\times$ (車の加速度 $a$ )」の大きさで、「車の加速度の逆向き」に作用しているという意味になります。
また、慣性力は他の物体から受ける実在の力ではなく、非慣性座標系 (ここでは並進座標系) でニュートンの運動方程式の形を保つために導入される「見かけの力」になります。
大事なポイントは慣性力を導入する場合、必ず「座標軸は非慣性系 (車内) に設定」し、運動方程式を立てることです。座標軸を設定する位置に注意しましょう。
慣性力が作用するモデルの具体例
次に、非慣性座標系における慣性力の具体的な扱いを、段階的なモデルで確認していきます。
ここでは、非慣性系での運動方程式の立て方と、慣性力の物理的意味を具体例を通して確認します。
まずは鉛直方向のみの単純なモデルから始め、その後、水平方向、斜面との組み合わせ、摩擦を含むモデルへと発展させていきます。
基本モデル (鉛直方向)
慣性力が重力と同一直線上に作用する最も基本的なモデルです。
- [エレベーター内で鉛直投げ上げ](

- [エレベータの運動と内部の運動](
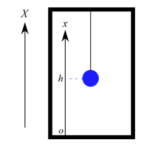
- [並進運動する車内での鉛直投げ上げ](
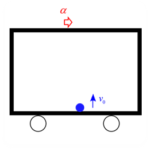
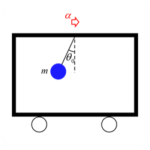
水平方向モデル
水平方向に加速する場合の慣性力の扱いを確認するモデルです。
- [電車内の慣性力](
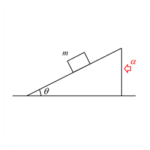
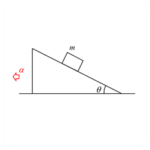
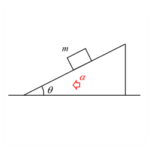
斜面との組み合わせ
慣性力と力の成分分解を同時に扱う発展モデルです。
- [動く斜面に置かれた物体](
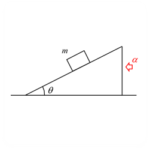
- [動く斜面上の物体の運動](
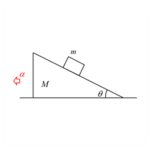
- [滑らかな斜面を昇る運動](
摩擦を含む発展モデル
静止条件と慣性力を組み合わせた発展的な完成モデルです。
- [動く粗い斜面上の物体が滑り出す条件](
- [動く粗い斜面上の物体が滑り出さない条件](
これらの問題では、必ず「非慣性系に軸を設定してから運動方程式を立てる」ことを意識してください。
次は「運動方程式から導かれる関係式」について解説します。