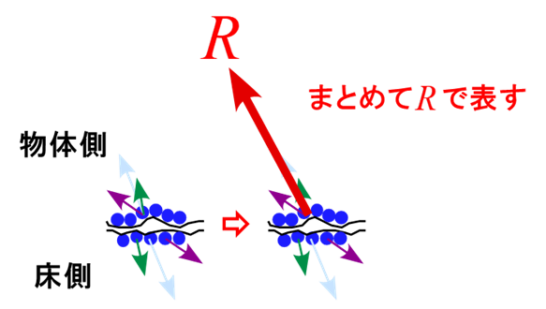
接している面から受ける抗力 $R$ について
「抗力 $R$ 」は「接している面から受ける力」になります。
「抗力 $R$ 」の正体は「分子間力 (電気的な力)」です。
分子や原子の一つ一つの力を「まとめて抗力 $R$ 」として表しています。
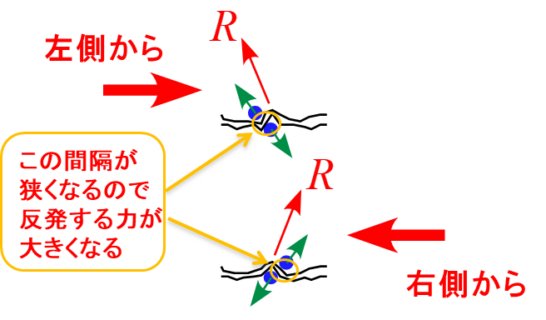
「抗力 $R$ 」の鉛直線からの傾きは「水平方向から受ける力(の合力)」によって変化します。
接触面において水平方向の変形が生じるため、分子間反発力の合力が傾くことになります。
左側から力を受けると図のように物体と床の接触面がせん断変形により反発が大きくなり左に傾きます。
右側から力を受けると図のように物体と床の接触面がせん断変形により反発が大きくなり右に傾きます。
注) 使用した文字「 $R$ 」は「 reaction (反作用)」に由来している。
左側から押された物体のモデル
「床に置かれた物体を左側から力 $F$ で押したモデル」を考えます。
まず、モデル図を描きます。
続いて、軸を設定します。
平面を考えるので、$x,y$ 軸の$2$軸を設定します。
さらに力の矢印を書き込むと
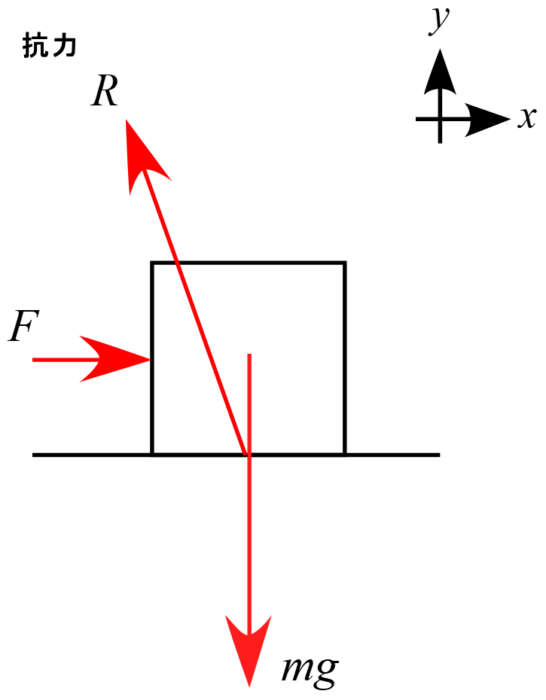
となります。
作用する力は「重力 $mg$」、「加えた力 $F$ 」、「(接触面からの) 抗力 $R$ 」となります。
「抗力 $R$ 」は軸に沿っていないので成分を分解する必要があります。
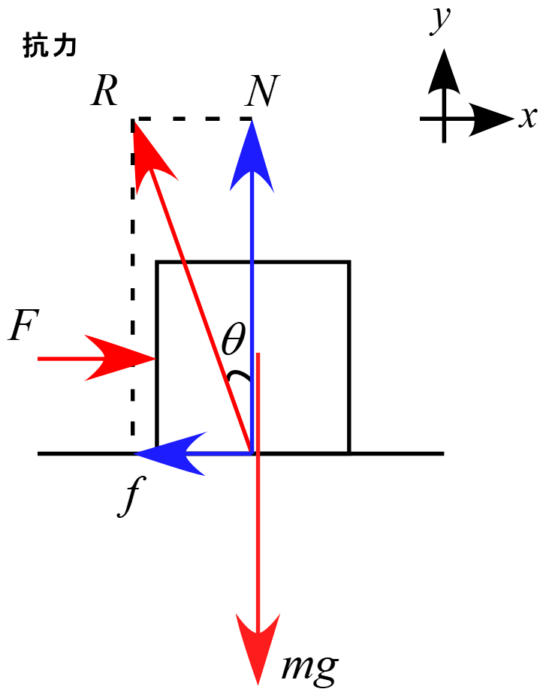
この「抗力 $R$ 」を $x,y$ 軸に沿って分解したものが「垂直抗力 $N$」と「摩擦力 $f$ 」になります。
図では作用する力を赤の矢印で表し、成分を分解したものを青の矢印で表しています。
また「垂直抗力 $N$」と「摩擦力 $f$ 」の比率は摩擦力において重要な物理量である「摩擦係数 $\mu$ 」で
$$
\begin{aligned}
\mu = \frac{f}{N}
\end{aligned}
$$
と定義されます。
「垂直抗力 $N$」は「Normal component of reaction」と表すので、「頭文字 N」を使って表します。
「摩擦力 $f$」は単に「force の f 」として表しています。
摩擦力は「静止している場合」と「動いている場合」では値が異なります。
皆さんも実生活においてある程度の重量がある物を押したとき、「動くまで押す力」と「動いている最中の押す力」が異なった経験があるかと思います。
この現象について深堀して説明をしていきます。
まずは作成した図から運動方程式を表すと
$$
\begin{aligned}
ma_x &=F-f \\
\\
ma_y &= N-mg
\end{aligned}
$$
となります。
それぞれの軸に対応した加速度 $a_x, a_y$ は $x,y$ を添え字で表しています。
ここでの「摩擦力 $f$ 」は「 静止摩擦力 $f_s$ 」と「動摩擦力 $f_k$ 」のどちらの場合も含んでいます。
物体が静止している場合
物体が静止している場合、$a_x=0,\ a_y=0$ ($x$ 方向も $y$ 方向も動かない)であるので
運動方程式は
$$
\begin{aligned}
0 &=F-f_s \\
\\
0 &= N-mg
\end{aligned}
$$
となります。
静止している状態の摩擦力は「静止摩擦力」と呼ぶので「 $f_s$ 」と表しています。
従って、
$$
\begin{aligned}
F &=f_s \\
\\
N &= mg
\end{aligned}
$$
となります。
ここで「 $N=mg$ 」となるので「重力 $mg$ 」の反作用は「垂直抗力 $N$ 」と誤解するかもしれませんが、
万有引力の法則で説明したように「重力 (地球が物体を引く力) $mg$ 」の反作用は「物体が地球を引く力」です。「垂直抗力 $N$ 」ではありません。
運動方程式を考えた結果「$=$ イコール」で結ばれていること過ぎないことに注意しましょう。
話を戻すと、この結果より
「加えた力 $F$ 」と「静止摩擦力 $f_s$」が等しくなっていることが判ります。
例えば
$F=5\ \text{N}$ 加えたら $f_s=5\ \text{N}$ となりますし、
$F=7\ \text{N}$ 加えたら $f_s=7\ \text{N}$ となります。
これはグラフの比例している部分に対応します。
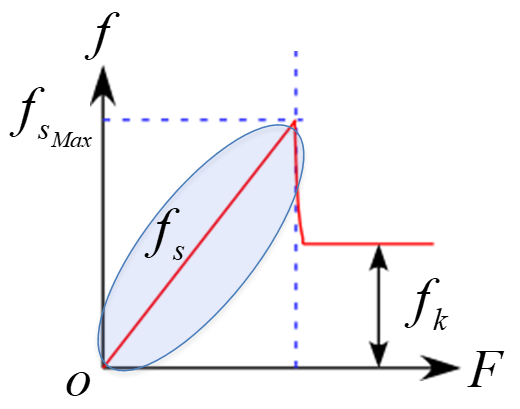
この「加える力 $F$ 」がある値に達すると物体は動き始めます。
その瞬間の摩擦力を「最大静止摩擦力 $f_{s_{Max}}$」と呼びます。
その後、物体に作用する摩擦力は最大静止摩擦力より小さくなります。
その状態の摩擦力を「動摩擦力 (運動摩擦力) $f_k$」と呼びます。
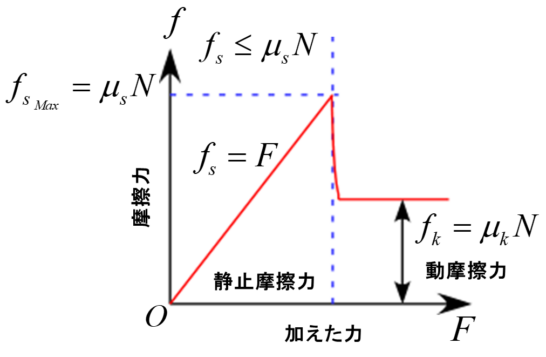
静止摩擦力 $f_s$ は
$$
\begin{aligned}
0 \le f_s \le\mu_s N
\end{aligned}
$$
の範囲で外力 $F$ に応じて変化し、「不等式」で表されます。
従って、静止摩擦力 $f_s$ は運動方程式と静止条件から決まる未知量であり、上限値が $\mu_s N$ になります。外力 $F$ がこの上限値を超えた場合、即ち
$$
\begin{aligned}
F>\mu_s N
\end{aligned}
$$
となれば運動開始となる訳です。
一方、動摩擦力 $f_k$ は
$$
\begin{aligned}
f_k =\mu_k N
\end{aligned}
$$
となり「等式」で表されます。
注) 添え字の「$s,k$」は「静的 $\text{static}$」と「動的 $\text{kinetic}$」に由来しています。
物体が運動している場合
物体が動き始めて「動摩擦力 $f_k$ 」の状態となった場合、$a_y=0$ (束縛条件)より運動方程式は
$$
\begin{aligned}
ma_x &=F-f_k \\
\\
0 &= N-mg
\end{aligned}
$$
と記述され、動摩擦係数は $\displaystyle \mu_k= \frac{f_k}{N}$ であるから
$$
\begin{aligned}
ma_x &=F-\mu_k N \\
\\
N &= mg
\end{aligned}
$$
となり、$2$式より
$$
\begin{aligned}
ma_x &=F-\mu_k mg \\
\end{aligned}
$$
と表されます。
例題 - 基礎モデル運動方程式
ここで基礎的なモデルにおいて運動方程式を立てる練習をしてみましょう。
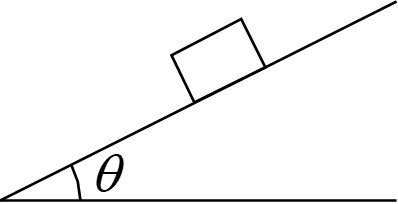
滑らかな斜面を滑り降りる運動モデル
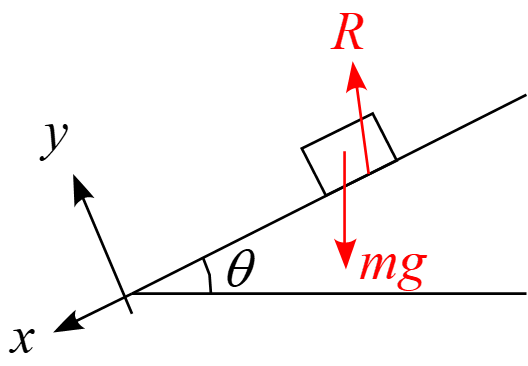
水平面となす角 $\theta$ の滑らかな斜面上を質量 $m$ の物体が滑り降りる運動モデルについて
まずは作図です。
軸の設定は $x$ 軸は「進行方向を正」に設定し、$y$ 軸は「斜面に対して垂直上向きを正」に設定します。
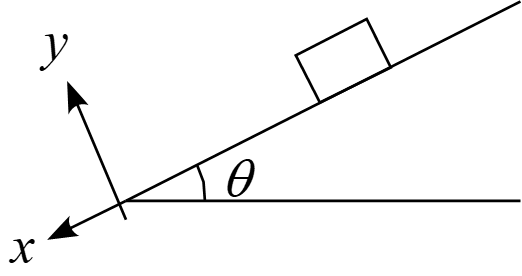
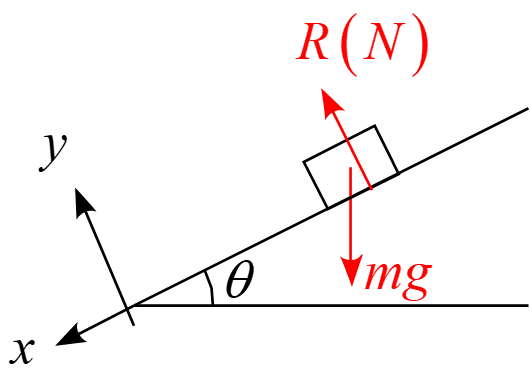
さらに、「作用する力の矢印」は「重力 $mg$ 」と「接触面からの抗力 $R$ 」になります。
モデルの設定で、「滑らかな斜面」とあるので「摩擦力 $f$」は作用しない(無視できる)と解釈します。
よって、「抗力 $R$ 」は「接触面の垂直上向きに対して傾かない」ことを意味します。
従って、図では「斜面に対して垂直な矢印」とし、「 $R\ (N)$ 」と記述しています。
続いて運動方程式を立てる訳ですが、このままでの状態では「作用する力 $mg$」と「$x,y$ 軸」が斜めなので運動方程式は立てられません。そこで「作用する力」を軸に沿って分解する必要があります。
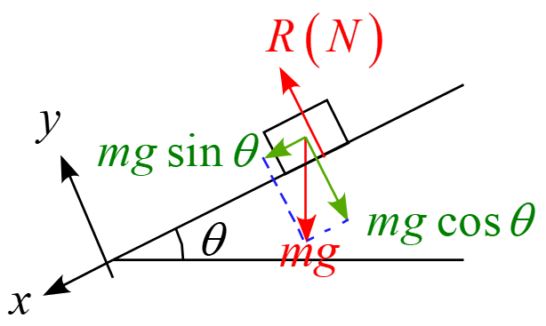
力を分解するとき、分解元の力が対角線になるように長方形をつくり、どのように分解したのがが判るように補助線まで描きましょう。
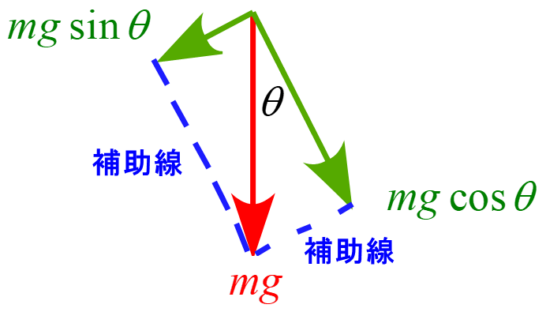
「作用する元の力」と「成分分解の結果」を区別する為、「作用する力を赤の矢印」とし「成分を分解したものを緑の矢印」とします。
運動方程式はそれぞれの軸の加速度を $a_x, a_y$ と表すと
$$
\begin{aligned}
ma_x &= mg \sin \theta \\
\\
ma_y &= N-mg\cos \theta
\end{aligned}
$$
となります。($R$ は $N$ と置き換えています)
ここで、$a_y=0$ (束縛条件)より
$$
\begin{aligned}
ma_x &= mg \sin \theta \\
\\
0 &= N-mg\cos \theta
\end{aligned}
$$
となります。
ここでの「束縛条件」とは「物体が斜面に束縛されている」ということで「斜面から飛び出さない」あるいは「斜面に潜らない」と言う意味です。
これらの結果より加速度 $a_x$ は
$$
\begin{aligned}
a_x &= g \sin \theta \\
\end{aligned}
$$
と表され、$g,\ \theta$ が定数であるためこのモデルの運動が等加速度運動であることが判ります。
粗い斜面を滑り降りる運動モデル
水平面となす角 $\theta$ の粗い斜面上を質量 $m$ の物体が滑り降りる運動モデルについて
まずは作図です。
軸の設定は $x$ 軸は「進行方向を正」に設定し、$y$ 軸は「斜面に対して垂直上向きを正」に設定します。
さらに、「作用する力の矢印」は「重力 $mg$ 」と「接触面からの抗力 $R$ 」になります。
続いて運動方程式を立てる訳ですが、このままでの状態では「作用する力 $mg, \ R$ 」と「$x,y$ 軸」が斜めなので運動方程式は立てられません。そこで「作用する力」を軸に沿って分解する必要があります。
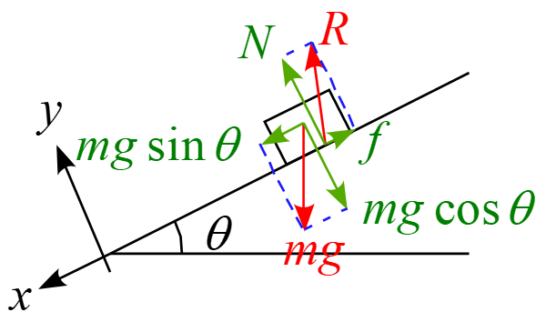
「作用する元の力」と「成分分解の結果」を区別する為、「作用する力を赤の矢印」とし「成分を分解したものを緑の矢印」とします。
運動方程式はそれぞれの軸の加速度を $a_x, a_y$ と表すと
$$
\begin{aligned}
ma_x &= mg \sin \theta -f\\
\\
ma_y &= N-mg\cos \theta
\end{aligned}
$$
となります。
ここで、$a_y=0$ (束縛条件)より
$$
\begin{aligned}
ma_x &= mg \sin \theta -f\\
\\
0 &= N-mg\cos \theta
\end{aligned}
$$
となります。
さらに、「動摩擦係数 $\displaystyle \mu_k = \frac{f}{N}$」を用いて表すと
$$
\begin{aligned}
f=\mu_k N
\end{aligned}
$$
と表されるので、これらの結果をまとめると運動方程式は
$$
\begin{aligned}
ma_x &= mg \sin \theta -\mu_k mg \cos \theta\\
\end{aligned}
$$
と表されます。
これらの結果より加速度 $a_x$ は
$$
\begin{aligned}
a_x &= g (\sin \theta - \mu_k \cos \theta)\\
\end{aligned}
$$
と表され、$g,\ \theta ,\ \mu_k$ が定数であるためこのモデルの運動が等加速度運動であることが判ります。
滑り降りるための $\theta$ の条件は
$$
\begin{aligned}
\sin\theta &> \mu_k \cos\theta\\
\\
\frac{\sin \theta}{\cos \theta} &>\mu_k
\end{aligned}
$$
であるため
$$
\begin{aligned}
\tan \theta &>\mu_k
\end{aligned}
$$
となる「斜面角 $\theta$ 」が必要になります。
粗い斜面において「実際に滑る条件」は静止摩擦で決まり、$\tan \theta >\mu_s$になります。
次は慣性力が作用するモデルについて扱います。