自由落下
それでは「自由落下」のモデルについて手順通りやってみましょう。
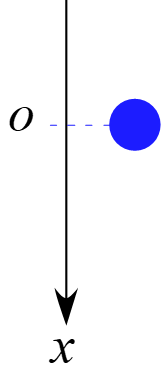
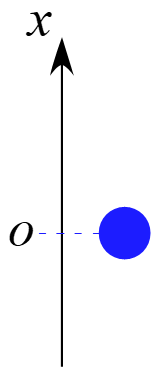
まず、モデル図を描く

物体の形は「〇」でも「□」でもいいです。実際の計算は「質点」として扱うので図での大きさは適当でも問題は無いです。
「質点」とは「質量を$1$点に集中させたもの(通常は重心)」として扱うということです。
続いて「軸の設定」になります。
「自由落下」は下に落ちるので「進行方向を正に設定」し、 $t=0$ で $x=0$ としてみましょう。
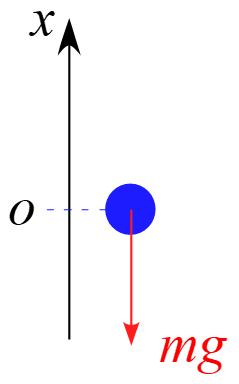
さらに、「作用する力の矢印」を書き込みましょう。
力を探す順は「場の力 $\to$ 接触力 $\to$ 慣性力」になります。
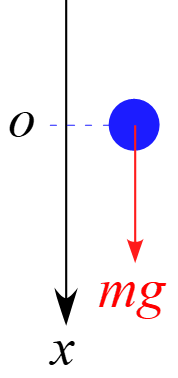
今回のモデルで作用している力は「重力 $mg$ 」のみになります。(空気抵抗は無視する理想化モデルとする)
最後に「運動方程式を立てる」と
$$
\begin{aligned}
ma =mg
\end{aligned}
$$
となります。
加速度 $a$ の向きと軸の向きは一致します。
運動方程式の立て方は、
まず、左辺に何も考えずに「 $ma=$ 」と記述します。
この段階では「作用している力の向きや符号」は考えなくても良いです。
続いて右辺に「作用している力 $F$ 」を書いていくことになります。複数の力が作用している場合、結果として「 $F$ は合力 ($\sum F$)」になります。
今回の作用している力は「重力 $mg$ 」のみなので、自分で設定した軸の向きに注意しながら
$$
\begin{aligned}
ma =mg
\end{aligned}
$$
と書きます。
「力の矢印の向き」と「軸の向き」が一致しているので「正」として扱います。
これで運動方程式が完成しました。
後は計算で速度 $v$ や位置 $x$ を求めるだけになります。
加速度の定義 $\displaystyle a=\frac{\diff v}{\diff t}$ ($1$次元) より運動方程式は
$$
\begin{aligned}
m\frac{\diff v}{\diff t} &=mg \\
\\
\frac{\diff v}{\diff t} &=g
\end{aligned}
$$
となります。
両辺を $t$ で積分すると
$$
\begin{aligned}
\int \frac{\diff v}{\diff t}\diff t &=\int g\ \diff t \\
\\
\int \diff v &=\int g\ \diff t \\
\\
v&=gt+C_1 \quad \quad \ (C_1:\mbox{積分定数})
\end{aligned}
$$
となります。
初期条件について、ここでは「静かに手を放した自由落下」と考え $v(0)=0$ とすると
$$
\begin{aligned}
v(0) =g\cdot 0+C_1 &= 0 \\
\\
C_1 &= 0
\end{aligned}
$$
となります。
従って
$$
\begin{aligned}
v(t)&=gt\end{aligned}
$$
となります。
位置 $x$ については、速度の定義 $\displaystyle v=\frac{\diff x}{\diff t}$ ($1$次元) より
$$
\begin{aligned}
v(t)&=\frac{\diff x}{\diff t}=gt\end{aligned}
$$
であるから、両辺 $t$ で積分すると
$$
\begin{aligned}
\int \frac{\diff x}{\diff t} \diff t &= \int gt\ \diff t\\
\\
\int \diff x &= \int gt \ \diff t\\
\\
x &=\frac{1}{2}gt^2 + C_2 \quad \quad \ (C_2:\mbox{積分定数})
\end{aligned}
$$
となります。
初期条件は $x(0)=0$ (原点スタート) であるから
$$
\begin{aligned}
x(0) =\frac{1}{2}g\cdot 0^2+C_2 &= 0 \\
\\
C_2 &= 0
\end{aligned}
$$
となります。
従って
$$
\begin{aligned}
x(t)&=\frac{1}{2}gt^2\end{aligned}
$$
となります。
それぞれの積分定数 $C_1,C_2$ は省略しないできちんと一つ一つ処理するようにしましょう。手抜きをするとミスが生じるので良くないです。
ここまでが一連の流れになります。
一つ一つの作業は難しくはないと思います。
「作図」 - 「軸設定」 - 「力の矢印」 - 「運動方程式」 - 「積分で計算」の流れです。
一つ一つの作業は難しくなくても、「一から自力でやる場合」にスラスラできるかは別問題です。
しかし、一つ一つ積み上げていくしかありません。
軸の設定とグラフ
ここで「軸の設定」についてすこし付け加えておきます。
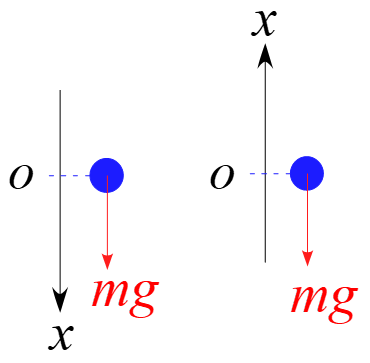
前述の自由落下のモデルでは「下向きを正に設定」しましたが、もし「上向きを正に設定」した場合とどのような違いが出てくるのか確認してみましょう。
作図について
軸の向きが変わるので運動方程式は
$$
\begin{aligned}
ma =-mg
\end{aligned}
$$
となります。
力の矢印の向きは下向きであることに対して軸は上向きなので「 $-mg$ 」となる訳です。
それに伴って、それ以後の計算は
$$
\begin{aligned}
\frac{\diff v}{\diff t} =-g
\end{aligned}
$$
となり
$$
\begin{aligned}
\int \frac{\diff v}{\diff t}\diff t &=\int (-g)\ \diff t \\
\\
\int \diff v &=\int (-g)\ \diff t \\
\\
v&=-gt+C_1 \quad \quad \ (C_1:\mbox{積分定数})
\end{aligned}
$$
となります。
初期条件 $v(0)=0$ は変化ないので
$$
\begin{aligned}
v(0) =-g\cdot 0+C_1 &= 0 \\
\\
C_1 &= 0
\end{aligned}
$$
より
$$
\begin{aligned}
v(t) =-gt \\
\end{aligned}
$$
となります。
位置 $x$ については
$$
\begin{aligned}
v(t)&=\frac{\diff x}{\diff t}=-gt\end{aligned}
$$
であるから、両辺 $t$ で積分すると
$$
\begin{aligned}
\int \frac{\diff x}{\diff t} \diff t &= \int (-gt)\ \diff t\\
\\
\int \diff x &= \int (-gt) \ \diff t\\
\\
x &=-\frac{1}{2}gt^2 + C_2 \quad \quad \ (C_2:\mbox{積分定数})
\end{aligned}
$$
となります。
初期条件は $x(0)=0$ (原点スタート) であるから
$$
\begin{aligned}
x(0) =-\frac{1}{2}g\cdot 0^2+C_2 &= 0 \\
\\
C_2 &= 0
\end{aligned}
$$
となります。
従って
$$
\begin{aligned}
x(t)&=-\frac{1}{2}gt^2\end{aligned}
$$
となります。
速度 $v$ も位置 $x$ も軸を下向きに設定した場合の「マイナス」状態となっていることが確認できます。
従って、高校物理での「自由落下の公式」などを覚えたりするのは無意味とは言いませんが、モデルの現象を理解する本質からズレた話なわけです。もちろん、「公式」として覚えていれば公式を当てはめるだけとはなりますが、「正負」の扱いとかに注意する必要も出て来る訳です。
例えば、「自由落下」で速度 $v$ を「 $v=gt$ 」と公式的に覚えていたとします。
しかし、問題の設定で「「軸が上向き正」になっていた場合、覚えていた公式を「 $v=-gt$ 」と変換する必要が出て来ることになります。せっかく覚えた公式のはずなのに場合よっては「公式の正負を入れ換える」とか余計な悩みが生じることになります。
公式自体を覚えるよりも手順をしっかり身に着けるようにしましょう。
話をグラフに戻します。
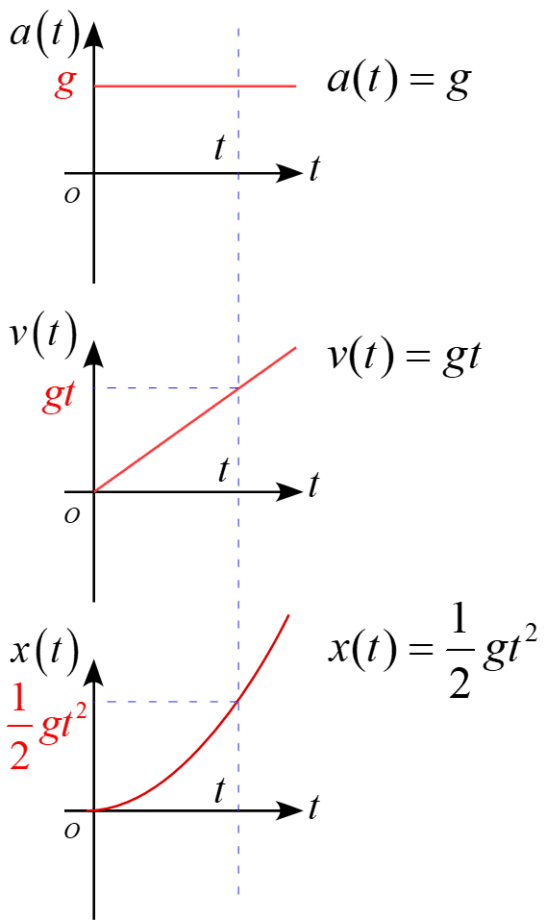
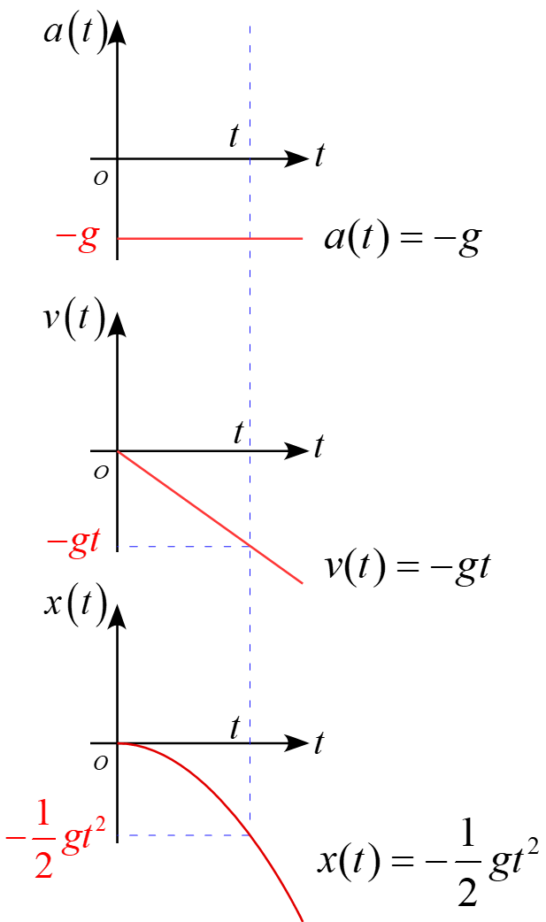
$a-t,v-t,x-t$ グラフを描くと、グラフも軸の設定によって正負が異なる結果になることが確認できます。
自由落下において軸を「下向き正」に設定した場合
自由落下において軸を「上向き正」に設定した場合
関数自体は$2$次関数までの範囲ですから式からグラフがすぐに描けるようにしましょう。
鉛直投げ上げ
ここで扱うモデルは「鉛直投げ上げ」です。
このモデルも良く扱われるモデルになります。
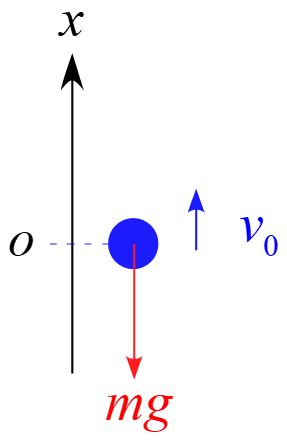
「初速度 $v_0$ で真上に投げ上げるモデル」を考えます。
手順通り進めて行きましょう。
まず、モデル図を描きます。

続いて、軸を設定します。
「投げ上げる」ので「最初の進行方向は上向き」となります。
それに合わせて「上向きを正」と設定し、開始点を原点 $x(0)=0$ とします。
さらに力の矢印を書き込むと
作用する力は「重力 $mg$ 」のみとなります。
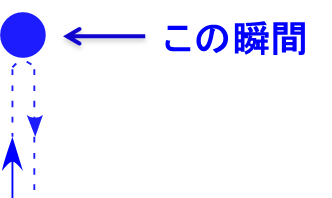
ここで注意点があります。
初速度 $v_0$ で投げ上げるので
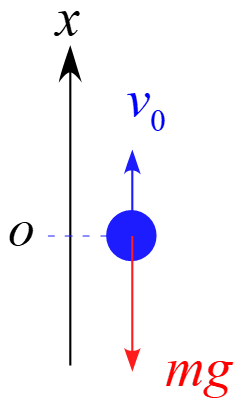
上図のような作図をしたくなるかもしれませんが間違える元になります。
初速度と運動中の力は異なります。
従って、上図の様な図を描いてしまうと、この後の運動方程式で
$$
\begin{aligned}
ma &=v_0 -mg \quad \quad \mbox{(注 : この式は誤り)}
\end{aligned}
$$
という間違った式を立ててしまう恐れが出ています。
よって、初速度 $v_0$ を図に書く場合
上図のように少し離して「初速度 $v_0$ の矢印」を描きましょう。
繰り返しになりますが「初速度は作用する力ではありません」
「力の矢印」と間違えないような図を作成しましょう。
さて、話を戻して最後に運動方程式を立てます。
まずは左辺に「 $ma=$ 」と書き、軸の向きに注意しながら右辺に力を書き加えていくことになります。
運動方程式は
$$
\begin{aligned}
ma &=-mg
\end{aligned}
$$
と表されます。
ここで、この式は「上向きを正に軸の設定した自由落下」の場合と運動方程式が同じになっています。
これは何を意味しているかと言うと「自由落下」も「鉛直投げ上げ」も運動中に作用している力は「重力にのみ」で同じであることになります。
「作用する力」が同じで、「軸の設定」も同じであれば「運動方程式」も同じになります。
では、何が異なる点かと言えば「初速度の有無」になります。
初期条件の違いが運動モデルの違いとなって表れている訳です。
加速度の定義 $\displaystyle a=\frac{\diff v}{\diff t}$ ($1$次元) より運動方程式は
$$
\begin{aligned}
m\frac{\diff v}{\diff t} &= -mg \\
\\
\frac{\diff v}{\diff t} &=-g
\end{aligned}
$$
となります。
両辺を $t$ で積分すると
$$
\begin{aligned}
\int \frac{\diff v}{\diff t}\diff t &=\int ( -g)\ \diff t \\
\\
\int \diff v &=\int (-g)\ \diff t \\
\\
v&=-gt+C_1 \quad \quad \ (C_1:\mbox{積分定数})
\end{aligned}
$$
となります。
初期条件は $v(0)=v_0$ であるから
$$
\begin{aligned}
v(0) =-g\cdot 0+C_1 &= v_0 \\
\\
C_1 &= v_0
\end{aligned}
$$
となります。
従って
$$
\begin{aligned}
v(t)&=-gt +v_0 \end{aligned}
$$
となります。
「鉛直投げ上げの速度の公式」とか覚えたかもしれませんが、覚える必要はありません。
それよりも「運動方程式から導出」できるようになって下さい。
位置 $x$ については、速度の定義 $\displaystyle v=\frac{\diff x}{\diff t}$ ($1$次元) より
$$
\begin{aligned}
v(t)&=\frac{\diff x}{\diff t}=-gt +v_0
\end{aligned}
$$
であるから、両辺 $t$ で積分すると
$$
\begin{aligned}
\int \frac{\diff x}{\diff t} \diff t &= \int (-gt+v_0)\ \diff t\\
\\
\int \diff x &= \int (-gt+v_0) \ \diff t\\
\\
x &=-\frac{1}{2}gt^2 + v_0 t +C_2 \quad \quad \ (C_2:\mbox{積分定数})
\end{aligned}
$$
となります。
初期条件は $x(0)=0$ (原点スタート) であるから
$$
\begin{aligned}
x(0) =-\frac{1}{2}g\cdot 0^2 +v_0 \cdot 0 +C_2 &= 0 \\
\\
C_2 &= 0
\end{aligned}
$$
となります。
従って
$$
\begin{aligned}
x(t)&=-\frac{1}{2}gt^2 +v_0 t
\end{aligned}
$$
となります。
$a-t, v-t , x-t$ グラフを描いてみると図のようになります。

$a-t$ グラフにおいて加速度 $a(t)$ は「 $a(t)=-g$ 」で一定になります。
$v-t$ グラフにおいて速度 $v(t)$ は「 $v(t)=-gt+v_0$ 」の$1$次関数になります。
$y$ 切片は $t=0$ の時の初速度 $v_0$ であることが確認できます。
$v(t_1)=0$ となる時刻 $t_1$ ($t$ 切片) は
$$
\begin{aligned}
v(t_1)=-gt_1 +v_0 &=0 \\
\\
t_1 &= \frac{v_0}{g}
\end{aligned}
$$
となります。
これは下図のような状態で
つまり、「投げ上げの最高点」になります。
$x-t$ グラフにおいて、位置 $x(t)$ は「 $\displaystyle x(t)=-\frac{1}{2}gt^2 +v_0t$ 」の$2$次関数になります。
$t^2$ の項の符号は「マイナス」なので「上に凸のグラフ」になります。
このグラフの頂点は $x(t)$ が一番大きい値、即ち「最高点」である時刻 $t_1$ のときになります。
従って最高点 $x(t_1)$ は
$$
\begin{aligned}
x(t_1)&=-\frac{1}{2}gt_1^2 +v_0 t_1 \\
\\
&=-\frac{1}{2}g \left( \frac{v_0}{g} \right)^2
+v_0 \cdot \frac{v_0}{g} \\
\\
&=\frac{v_0^2}{2g}
\end{aligned}
$$
と計算できます。
$2$次関数なので頂点の座標の時刻 $t_1$ の$2$倍が再び $x=0$ ($t$ 切片) となる時刻 $t_2$ となります。
従って、
$$
\begin{aligned}
t_2 & =2t_1 = 2\cdot \frac{v_0}{g}=\frac{2v_0}{g}
\end{aligned}
$$
となります。
別の視点として、$x(t)$ の式に着目し $t$ 切片を考えると
$$
\begin{aligned}
x(t)&=-\frac{1}{2}gt^2 +v_0 t \\
\\
&=\left (-\frac{1}{2}gt +v_0 \right)t
\end{aligned}
$$
と変形することができます。この式が $0$ の値を取るのは「 $t=0$ 」または「 $\displaystyle -\frac{1}{2}gt+v_0=0$ 」の場合となります。前者はスタート時なので、後者が再び戻ってきたとき $t_2$ になり、
$$
\begin{aligned}
-\frac{1}{2}gt_2 +v_0 &=0 \\
\\
t_2 &=\frac{2v_0}{g}
\end{aligned}
$$
となり、前の結果である「 $t_2=2t_1$ 」と一致します。
更に数学的に扱い、位置の式 $x(t)$ を平方完成すると
$$
\begin{aligned}
x(t)&=-\frac{1}{2}gt^2 +v_0 t \\
\\
&=-\frac{1}{2}g \left [t^2 +v_0 t \left( -\frac{2}{g} \right) \right] \\
\\
&= -\frac{1}{2}g \left [t^2 -\frac{2v_0}{g} t \right] \\
\\
&= -\frac{1}{2}g \left [\left( t-\frac{v_0}{g} \right)^2 - \left( \frac{v_0}{g} \right)^2 \right] \\
\\
&= -\frac{1}{2}g \left [\left( t-\frac{v_0}{g} \right)^2 - \frac{v_0^2}{g^2} \right] \\
\\
&= -\frac{1}{2}g \left( t-\frac{v_0}{g} \right)^2 - \frac{v_0^2}{g^2} \left( -\frac{1}{2}g \right) \\
\\
&= -\frac{1}{2}g \left( t-\frac{v_0}{g} \right)^2 + \frac{v_0^2}{2g}
\end{aligned}
$$
となります。
従って、頂点の座標は
$$
\begin{aligned}
\left( t, x(t) \right) = \left( \frac{v_0}{g} , \frac{v_0^2}{2g} \right)
\end{aligned}
$$
となり、「物理的に検討した結果」と「数学的に検討した結果」が一致していることが確認できます。
空気抵抗を無視しない落下運動 (自由落下の拡張) について
自由落下の解説では「「空気抵抗を無視した理想的なモデル」として扱いましたが、ここでは「空気による抵抗力 $D$ 」が作用した場合を少しだけ紹介します。
軸を進行方向である「下向き正」とすると作用する力は「重力 $mg$ 」と「空気の抵抗力 $D$ (運動方向と反対向き)」となるので作図は
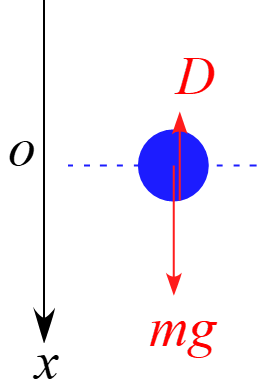
となります。
運動方程式は
$$
\begin{aligned}
ma &=mg -D
\end{aligned}
$$
と表されます。
「空気の抵抗力 $D$ 」の扱いについては複数のモデルがあります。
ここでは「速度に比例するモデル (雨滴の近似モデル)」をこちらに紹介しておきます。
重力だけの場合は加速度 $a$ は一定でした。
しかし空気抵抗 $D$ がある場合、加速度 $a$ は一定とは限りません。
特に空気抵抗 $D$ が速度 $v$ に依存する場合、加速度 $a$ も時間とともに変化します。
その結果、微分方程式は単純な積分では解けなくなります。
空気抵抗 $D$ が大きくなり、「 $mg=D$ 」となるとき、加速度 $a$ は $0$ となり、物体は一定の速度に達します。このとき、重力 $mg$ と空気抵抗 $D$ がつり合っている状態になります。
このときの速度を「終端速度」と呼びます。
注) 使用した文字「 $D$ 」は「 drag (空気抵抗)」に由来している。
次は「接触面から受ける抗力 $R$ 」が作用するモデルの例を扱います。