運動の基本的な量
$$
\begin{aligned}
&\cdot\ \mbox{位置(ベクトル)}\ \vec{r} \ \mbox{:物体の場所} \\
&\cdot\ \mbox{変位(ベクトル)}\ \Delta \vec{r} \ \mbox{:位置の変化} \\
&\cdot\ \mbox{速度(ベクトル)}\ \vec{v} \ \mbox{:変位の変化率} \\
&\cdot\ \mbox{加速度(ベクトル)}\ \vec{a} \ \mbox{:速度の変化率} \\
\end{aligned}
$$
物体の運動を考える際に基本的な物理量である
「位置」 「速度」 「加速度」を定義していきます。
「位置」 「速度」 「加速度」のいずれもベクトル量になります。
即ち、「向きと大きさ」を持った量ということに注意しましょう。
まず、「位置」は「物体の場所」を表しています。
続いて、物体が動いた場合、
どれだけ動いたのかを表すのが「変位」になります。
そして、その変位の時間的な割合が「速度」であり、
その速度の時間的な変化の割合を「加速度」と呼びます。
位置ベクトル $\vec{r}$
物理は「物(モノ)」の「理(コトワリ)」の学問です。
その「物」がどこに在るのかを表す方法が「位置ベクトル」になります。
「物体」がどこに在るかを表すには、まず「観測者」が必要になります。
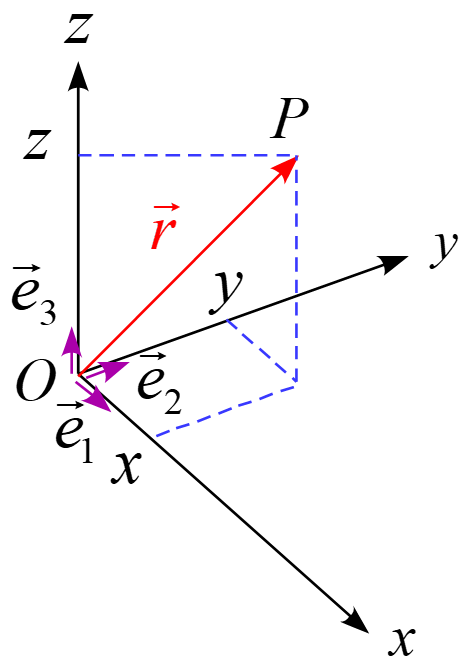
この「観測者」が居る点を「原点$O$」に取り、
「物体」のある位置$P$ を位置ベクトルで表すと
$$
\begin{aligned}
\vec{r}= \overrightarrow{OP}
\end{aligned}
$$
となります。
実は、原点(観測者)の位置はモデルによって自分で決めることになります。
点$P$の座標を$P(x,y,z)$とし、$x,y,z$軸の単位ベクトルを$\vec{e_1} , \vec{e_2}, \vec{e_3}$ とすると
$$
\begin{aligned}
\vec{r}=\overrightarrow{OP} = x\vec{e_1}+y\vec{e_2}+z\vec{e_3}
\end{aligned}
$$
と表すことができます。
変位(ベクトル) $\Delta \vec{r}$
物体がある時刻$t$で点$P$に居て、時刻$t+\Delta t$ で点$P'$に居たとします。
この時、時間$\Delta t$ の間に物体が点$P$から点$P'$に移動したと考え、
この移動を「点$P$から点$P'$へ変位した」と言います。
変位$\Delta \vec{r}$と距離$|\Delta \vec{r}|$は似ている部分もあるが、扱いや意味が異なる部分もあるので注意が必要になります。
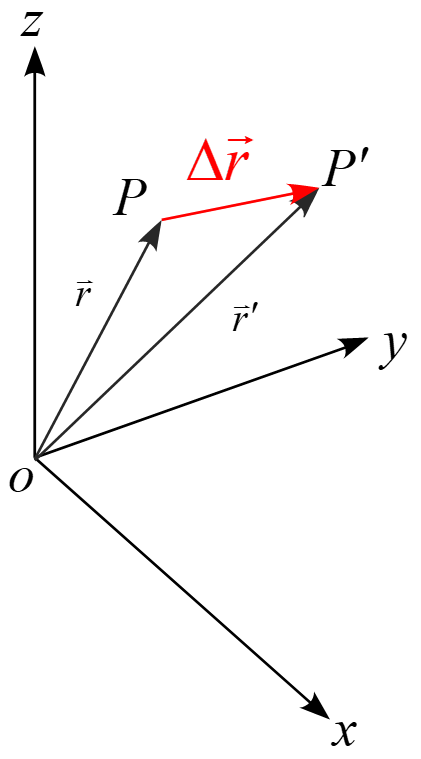
図で、$\triangle OPP'$に着目すると
$$
\begin{aligned}
\vec{r'}= \vec{r} + \Delta \vec{r}
\end{aligned}
$$
となります。
従って、変位$\Delta \vec{r}$は
$$
\begin{aligned}
\Delta \vec{r}= \vec{r'} - \vec{r}
\end{aligned}
$$
と表され、位置ベクトルが時間$t$の関数として表すと
$$
\begin{aligned}
\Delta \vec{r}= \vec{r} (t+\Delta t) - \vec{r}(t)
\end{aligned}
$$
となります。
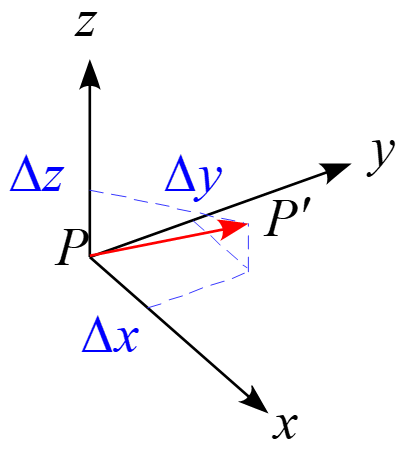
変位部分だけに着目すると
$$
\begin{aligned}
\Delta \vec{r}=
\left(
\begin{array}{c}
\Delta x \\
\Delta y \\
\Delta z
\end{array}
\right)
\end{aligned}
$$
と表され、これはそれぞれの成分ごとに扱うことができます。
これはとても重要なことで、
直線(1次元)運動なら
$$
\begin{aligned}
x' =x + \Delta x
\end{aligned}
$$
平面(2次元)運動なら
$$
\begin{aligned}
x' &= x + \Delta x \\
y' &= y + \Delta y
\end{aligned}
$$
立体的(3次元)な運動
$$
\begin{aligned}
x' &= x + \Delta x \\
y' &= y + \Delta y \\
z' &= z + \Delta z
\end{aligned}
$$
と運動の種類によって成分を設定し、それぞれの軸に沿って考えればよいということになります。
速度(ベクトル) $\vec{v}$
変位が「時間あたりどれくらいであるか?」というものを表した量が「速度」になります。
さて、物理では「時間変化」が重要になります。
例えば、「物体」が動いたとしたとき、ある時刻での「位置、速度(速さ)、加速度」などを知りたくなる訳です。
それでは、まずは「速さ」について説明していきましょう。
大前提として、「速さや速度は直接測定される量ではなく、位置と時間から計算で定義される量である」ことを認識する必要があります。
例えば、長さは「ものさし」をあてれば測れますし、時間も「時計」などで測れます。
しかし、「速さ」は「直接測る量」ではなく計算によって「算出される量」となります。
車のスピードメーターやスポーツの球速を表示するスピードガンなどがありますが、
これは装置の内部で $\Delta t$ と $\Delta x$ を測定し、計算した値を表示していることになります。
これまで、生活していく上で「速さ」と「速度」の違いについてあまり意識しないで利用していたかもしれませんが、物理ではこの違いはしっかりと認識しておく必要があります。
$$
\begin{aligned}
\mbox{速さ}\ |\vec{v}| &\mbox{: 大きさのみ (スカラー)} \\
\\
\mbox{速度}\ \vec{v} &\mbox{: 速さ+向き (ベクトル)}
\end{aligned}
$$
物理では「大きさ」も「向き」も大事です。
「速さ」と記述されていたら「向きは不明」であり、
「速度」と記述されていたら「向きは決まっている」と解釈します。
話を単純にするために一次元の直線運動 ( $x$ 軸上)のモデルとして考えるとします。
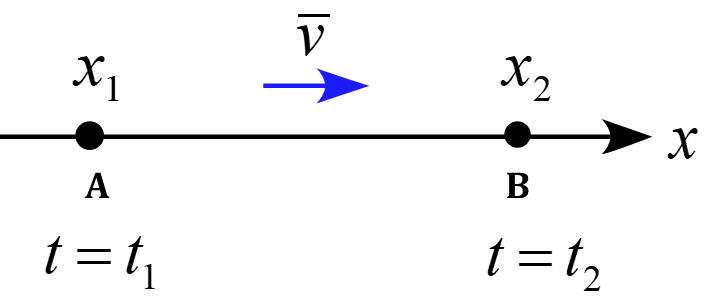
右側を $x$ 軸の正と設定します。
時刻 $t_1$ に点 $A$ にあり、その座標を $x_1$ とし、
時刻 $t_2$ に点 $B$ にあり、その座標を $x_2$ とします。
このモデルの運動について $x-t$ グラフで表すと図のようになります。(曲線の内容については任意)
横軸が時間 $t$ で縦軸が位置 $x$ となります。
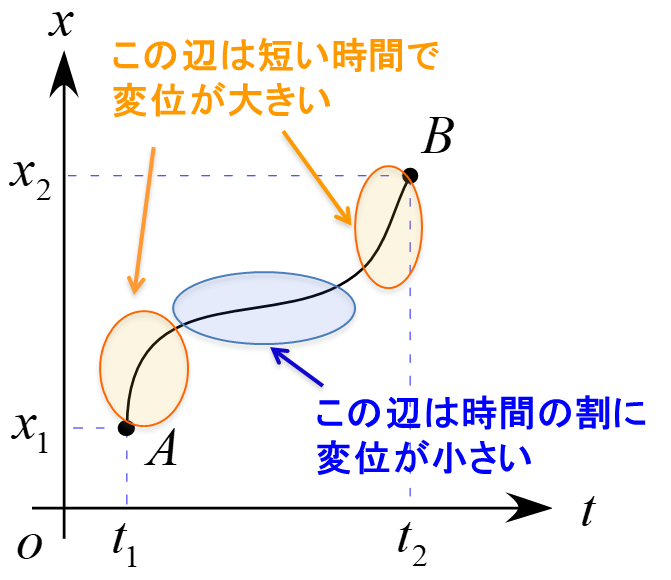
点 $AB$ 間の曲線において、傾きが急な部分もあれば、なだらかな部分もあります。
傾きが急な部分は「短い時間での変位が大きい」即ち「速い」ことを表していて、
傾きがなだらかな部分は「時間の割に変位が小さい」即ち「遅い」ことを表しています。
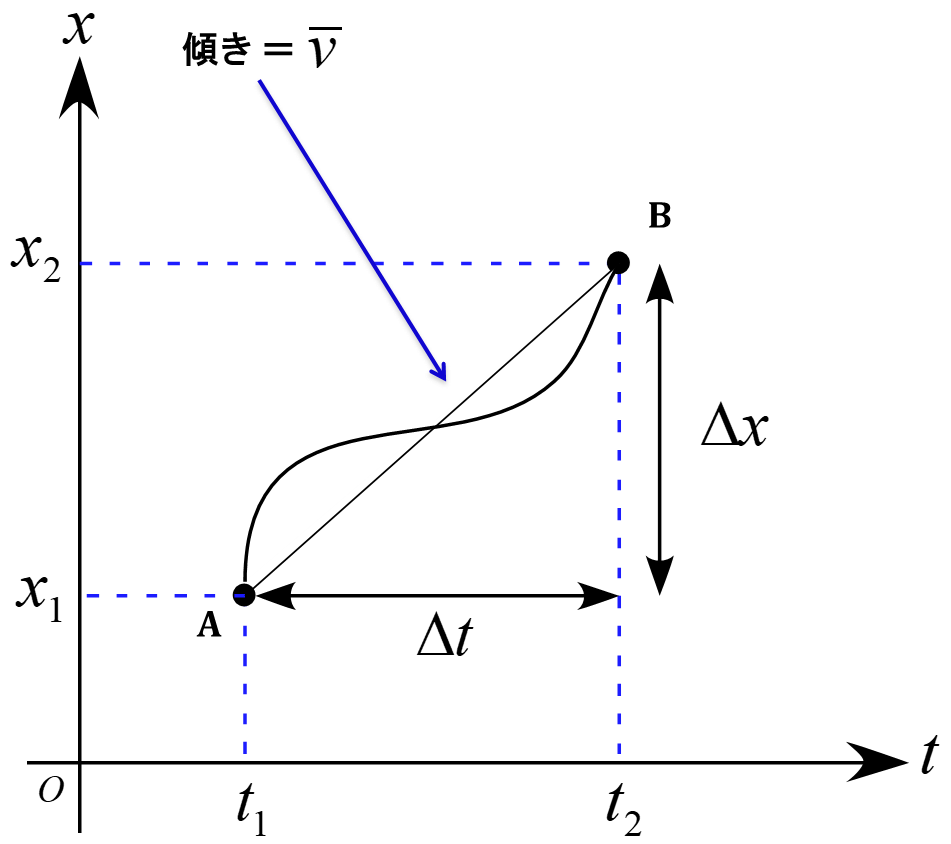
平均の速度 $\bar{v}$ は
$$
\begin{aligned}
\bar{v} = \frac{\Delta x}{\Delta t} = \frac{x_2 - x_1}{t_2 - t_1}
\end{aligned}
$$
と表すことができます。
図においては、「スタート地点と終点を結んだ直線の傾き」ということになります。
「傾きが急な部分もあり、なだらかな部分もあるが、
平均して考えると2点を結んだ直線で表すことができる」
ということになります。
「(平均の)速度」は $x-t$ グラフの傾きとなります。
この考え方が重要で、この「傾き」の概念がこの後に出て来る「微分」につながることになります。
(瞬間の)速度
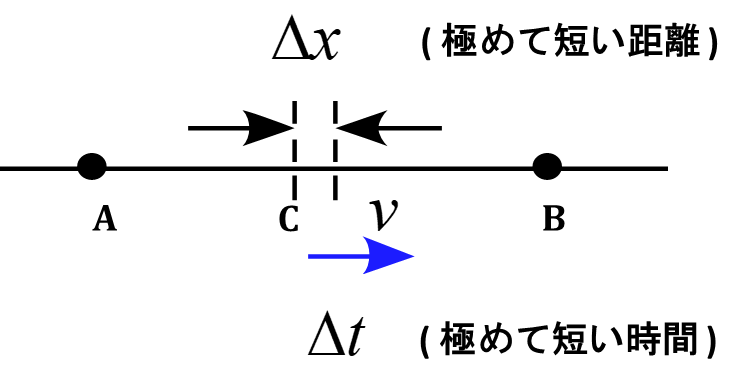
点 $AB$ 間のある点 $C$ から $\Delta t$ 後に $\Delta x$ 変位したとする。
これを $x-t$ グラフで表すとどうなるか考えると、
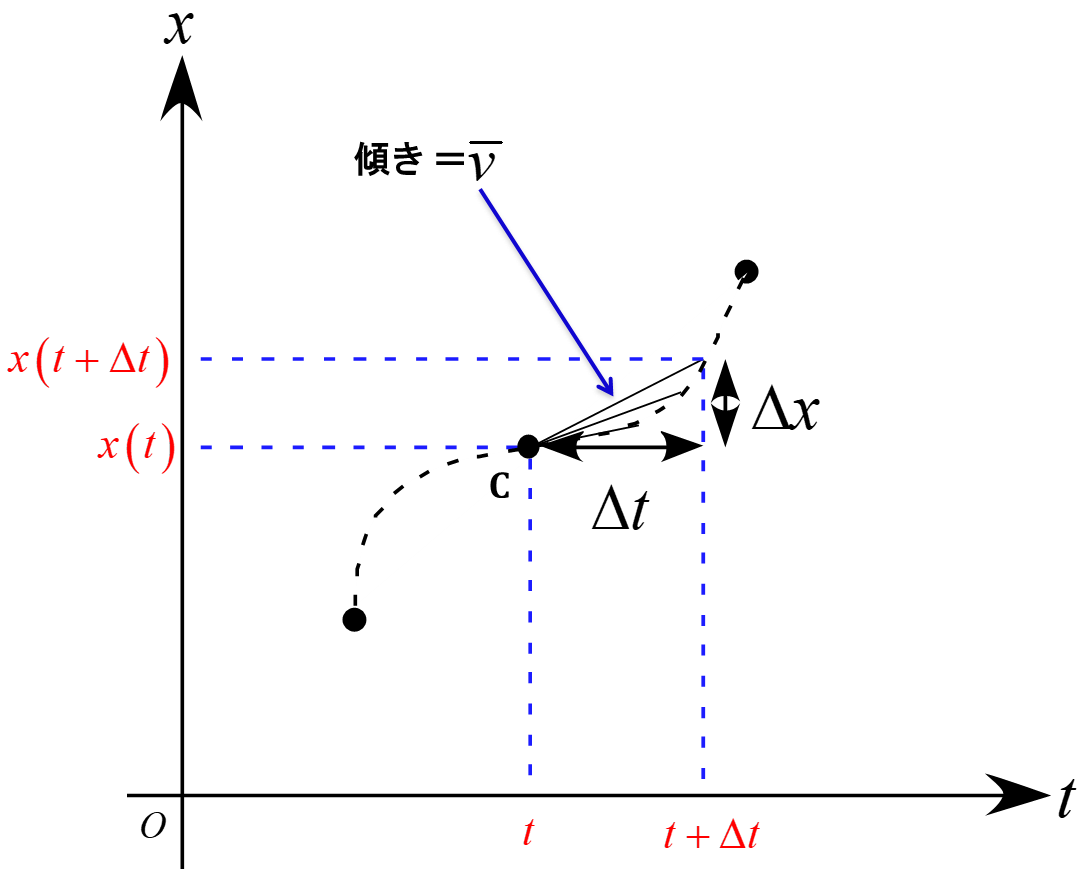
点 $C$ の時刻を $t$ とすると、そのときの位置は $x(t)$ と表すことができます。
そこから、時間 $\Delta t$ 経ったとすると、その位置は $x(t + \Delta t)$ と表すことができます。
従って、
$$
\begin{aligned}
\Delta t \ \mbox{の間の平均の速度 :}\ \bar{v} = \frac{\Delta x}{\Delta t}
= \frac{x(t+ \Delta t)-x(t)}{\Delta t}
\end{aligned}
$$
と表すことができます。
この $\Delta t$ を小さくしていくことを考えます。
すると、ほぼ接線に近づいていくイメージになります。
つまり、点 $C$ の瞬間の速度は $\Delta t \to 0$ の極限を考えることとなり
$$
\begin{aligned}
\mbox{瞬間の速度 :}\ v
=\lim_{\Delta t \to 0} \frac{x(t+ \Delta t)-x(t)}{\Delta t}
\end{aligned}
$$
と表すことができます。
この式は、高校数学で学習した微分の定義「導関数」そのものであることが解ります。
よって、瞬間の速度 $v$ は
$$
\begin{aligned}
\mbox{(瞬間の)速度 :}\ v
=\lim_{\Delta t \to 0} \frac{x(t+ \Delta t)-x(t)}{\Delta t}
= \frac{\diff x}{\diff t}
\end{aligned}
$$
と表すことができます。
従って、「速度 $v$ は位置 $x$ を時間 $t$ で微分することにより定義される」ことが解ります。
加速度(ベクトル) $\vec{a}$
続いて、加速度についてです。
物体が運動中に速度が速くなったり、遅くなったりしたとします。
この「速度の変化の度合いについて表す物理量」が「加速度」になります。
加速度は「速度の時間変化率」とも言えます。
速度の場合と同様に、話を単純にするために一次元の直線運動 ( $x$ 軸上)のモデルとして考えると
点 $A$ を時刻 $t_0$ に速度 $v_0$ で通過し、
点 $B$ を時刻 $t_1$ に速度 $v_1$ で通過したとします。
この時
$$
\begin{aligned}
\mbox{時間変化}\ & \mbox{: }\ \Delta t = t_1-t_0 \\
\\
\mbox{速度変化}\ & \mbox{: }\ \Delta v = v_1 -v_0
\end{aligned}
$$
と表すことができます。
このモデルをグラフで表すと
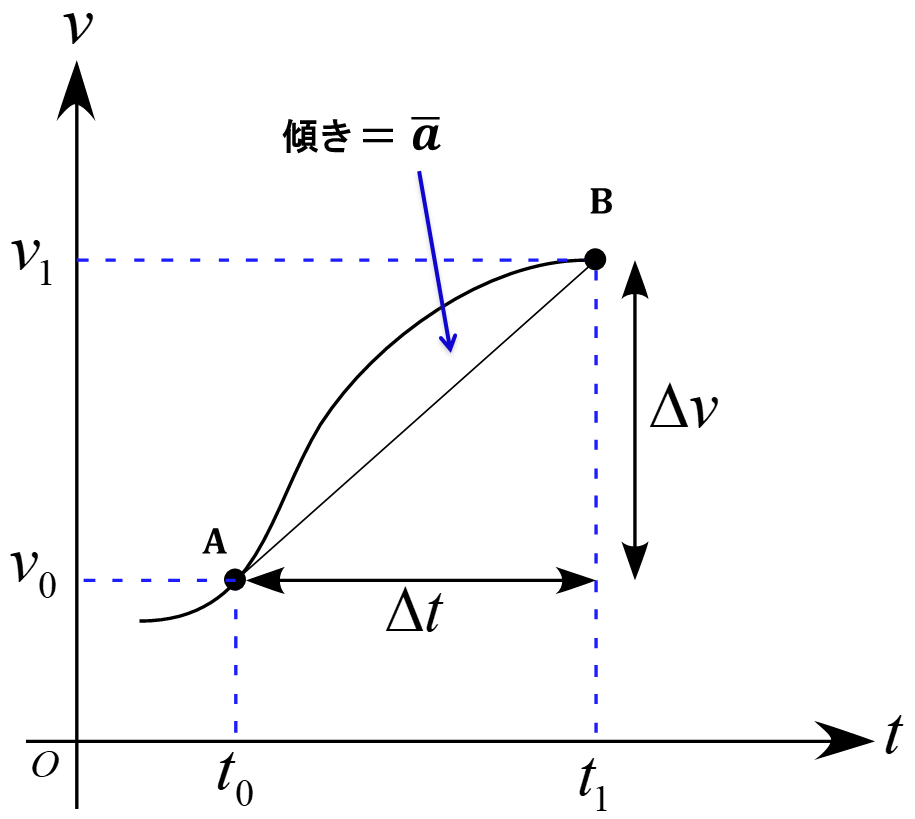
となります。(曲線は任意)
よって、「速度の変化率」である平均の加速度 $\bar{a}$ は
$$
\begin{aligned}
\bar{a} = \frac{\Delta v}{\Delta t} = \frac{v_1 - v_0}{t_1 - t_0}
\end{aligned}
$$
と表すことができます。
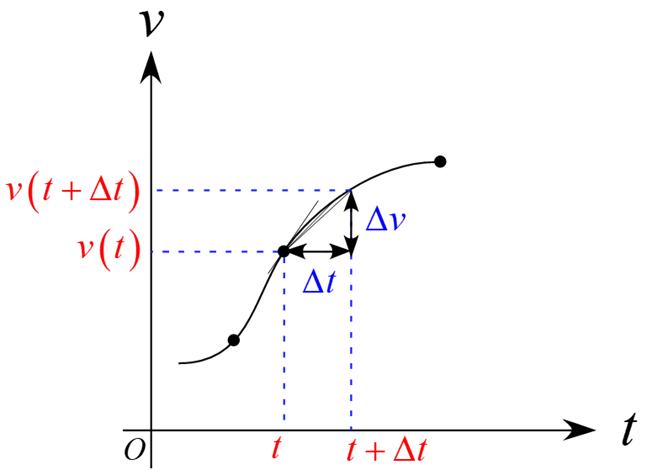
さらに、点 $AB$ 間のある点 $C$ において、
点 $C$ の時刻を $t$ とすると、そのときの速度は $v(t)$ と表すことができます。
そこから、時間 $\Delta t$ 経ったとすると、その速度は $v(t + \Delta t)$ と表すことができます。
従って、
$$
\begin{aligned}
\Delta t \ \mbox{の間の平均の加速度 :}\ \bar{a} = \frac{\Delta v}{\Delta t}
= \frac{v(t+ \Delta t)-v(t)}{\Delta t}
\end{aligned}
$$
と表すことができます。
速度の場合と同様に $\Delta t$ を小さくしていくことを考えると、
即ち、点 $C$ の瞬間の加速度は $\Delta t \to 0$ の極限を考えることとなり
$$
\begin{aligned}
\mbox{瞬間の加速度 :}\ a
=\lim_{\Delta t \to 0} \frac{v(t+ \Delta t)-v(t)}{\Delta t}
\end{aligned}
$$
と表すことができます。
この式も、速度の場合と同様に微分の定義「導関数」そのものであることが解ります。
よって、瞬間の加速度 $a$ は
$$
\begin{aligned}
\mbox{(瞬間の)加速度 :}\ a
=\lim_{\Delta t \to 0} \frac{v(t+ \Delta t)-v(t)}{\Delta t}
= \frac{\diff v}{\diff t}
\end{aligned}
$$
と表すことができます。
従って、「加速度 $a$ は速度 $v$ を時間 $t$ で微分することにより定義される」ことが解ります。
さらに、速度の結果 $\displaystyle v= \frac{\diff x}{\diff t}$ を用いると、
$$
\begin{aligned}
a = \frac{\diff v}{\diff t} = \frac{\diff }{\diff t} \left( \frac{\diff x}{\diff t} \right) = \frac{\diff^2 x}{\diff t^2}
\end{aligned}
$$
と表すことができ、
「位置 $x$ を2回、時間 $t$ で微分すると加速度 $a$ になる」ことを表しています。
位置・速度・加速度の関係
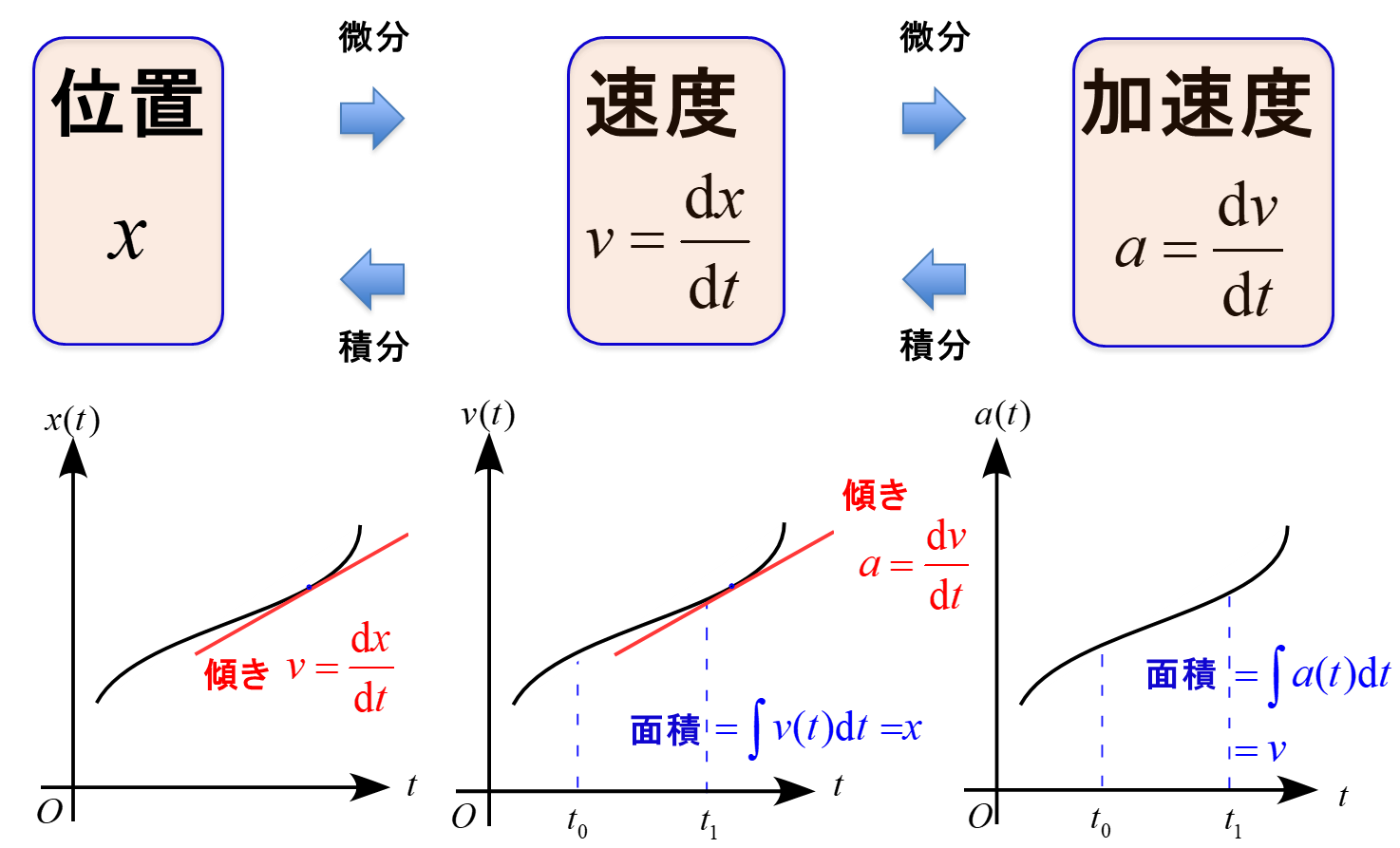
1次元モデルにおける「位置・速度・加速度」の関係を図に表したものになります。
位置 $x$ を時間 $t$ で微分すると速度 $v$ が得られ、さらに速度 $v$ を時間 $t$ で微分すると加速度 $a$ が得られます。
また、加速度 $a$ を時間 $t$ で積分すると速度 $v$ が得られ、さらに速度 $v$ を時間 $t$ で積分すると位置 $x$ が得られます。
積分する際に積分定数が出て来ることになりますが、これは初期条件によって決定することになります。
これらの関係により、「位置・速度・加速度」のいづれか1つが求まれば、残り2つは計算により求めることができます。
後述しますが、加速度 $a$ は運動方程式から求めることができるので、力学のモデルの基本的な流れは「運動方程式を立てる」、「加速度を表す」、「残り2つの量を求める」となります。
3次元空間への拡張
ここまでの内容を3次元空間に拡張すると
位置(ベクトル) $\vec{r} = (x,y,z)$ とすると、
速度 $\vec{v}$ は「位置 $\vec{r}$ の時間微分」となるので
$$
\begin{aligned}
\vec{v}= \frac{\diff \vec{r}}{\diff t} =
\left(
\begin{array}{c}
\frac{\diff x}{\diff t} \\
\frac{\diff y}{\diff t} \\
\frac{\diff z}{\diff t}
\end{array}
\right) =
\left(
\begin{array}{c}
v_x \\
v_y \\
v_z
\end{array}
\right)
\end{aligned}
$$
と表すことができます。
単位ベクトル $(e_1, e_2, e_3)$ を用いて式で表すと
$$
\begin{aligned}
\vec{v} =\frac{\diff x}{\diff t} \vec{e_1}+ \frac{\diff y}{\diff t} \vec{e_2}+ \frac{\diff z}{\diff t} \vec{e_3}
\end{aligned}
$$
とも表すことができます。
成分表示だけでなく、式で表した方が都合が良い場合もあります。
加速度$\vec{a}$ は「速度 $\vec{v}$ の時間微分」となるので
$$
\begin{aligned}
\vec{a}= \frac{\diff \vec{v}}{\diff t} =
\left(
\begin{array}{c}
\frac{\diff v_x}{\diff t} \\
\frac{\diff v_y}{\diff t} \\
\frac{\diff v_z}{\diff t}
\end{array}
\right) =
\left(
\begin{array}{c}
\frac{\diff }{\diff t} \big(\frac{\diff x}{\diff t} \big)\\
\frac{\diff }{\diff t} \big(\frac{\diff y}{\diff t} \big)\\
\frac{\diff }{\diff t} \big(\frac{\diff z}{\diff t} \big)
\end{array}
\right) =
\left(
\begin{array}{c}
\frac{\diff^2 x}{\diff t^2} \\
\frac{\diff^2 y}{\diff t^2} \\
\frac{\diff^2 z}{\diff t^2}
\end{array}
\right) =
\left(
\begin{array}{c}
a_x \\
a_y \\
a_z
\end{array}
\right)
\end{aligned}
$$
と表すことができます。
単位ベクトル $(e_1, e_2, e_3)$ を用いて式で表すと
$$
\begin{aligned}
\vec{a} =\frac{\diff^2 x}{\diff t^2} \vec{e_1}+ \frac{\diff^2 y}{\diff t^2} \vec{e_2}+ \frac{\diff^2 z}{\diff t^2} \vec{e_3}
\end{aligned}
$$
とも表すことができます。
次に読む:等速度運動・等加速度運動 , ニュートン力学