運動方程式から「力積と運動量の関係式」の導出
ここでは「力積と運動量の関係」を解説していきます。
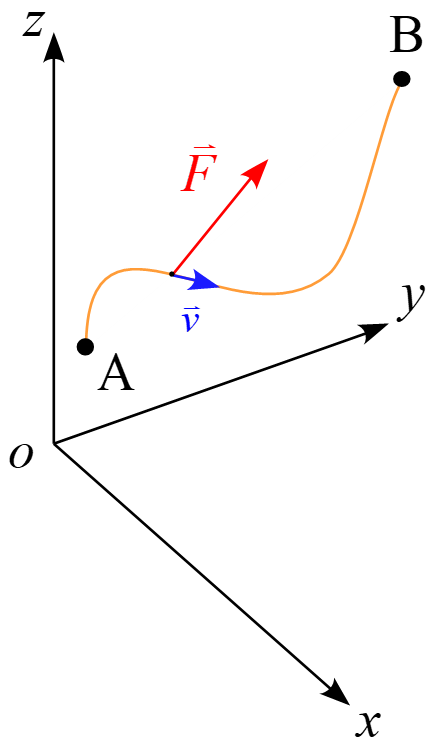
3次元空間での一般的なモデルを考えてみましょう。
運動方程式は
$$
\begin{aligned}
m \vec{a} &= \vec{F} \\
\\
m \frac{\diff \vec{v}}{\diff t} &=\vec{F}
\end{aligned}
$$
となります。
ここで、質量 $m$ が一定なら、左辺を積の微分としてまとめて
$$
\begin{aligned}
\frac{\diff}{\diff t} \left( m\vec{v}\right) = \vec{F}
\end{aligned}
$$
と表されます。
この式の形は「ニュートンが初めに提唱した運動方程式の形」になります。
運動方程式は $m\vec{a}=\vec{F}$ が有名過ぎてこの形の式に馴染みがないかもしれませんが、こちらの形が先になります。
(ただし高校〜学部初年級の範囲では通常 $m=\text{const.}$ を仮定できるので、$m\vec{a}=\vec{F}$ の形で十分に扱えます。)
従って、一般形の運動方程式「 $\displaystyle \frac{\diff}{\diff t} \left( m\vec{v}\right) = \vec{F}$ 」において、「質量 $m$ が定数なら $\displaystyle m\frac{\diff \vec{v}}{\diff t} =\vec{F}$ と書き換えられる」と言うのが正しいわけです。
実はこの形「 $\displaystyle \frac{\diff}{\diff t} \left( m\vec{v}\right) = \vec{F}$ 」は質量 $m$ が一定でない場合も含んでいます。
この式の左辺を計算すると
$$
\begin{aligned}
\frac{\diff}{\diff t} \left( m\vec{v}\right) =
\frac{\diff m}{\diff t} \vec{v}+ m\frac{\diff \vec{v}}{\diff t}
\end{aligned}
$$
となります。
ここで「 $\displaystyle \frac{\diff m}{\diff t}=0$ 」、即ち「質量 $m$ の時間変化無し」とすれば「第$1$項が $0$」となり「第$2$項が $\displaystyle m\frac{\diff \vec{v}}{\diff t}$ 」が残ることになります。
質量が変化するモデルの例として「ロケット (燃料が減る)」や「物体の分裂」などがあります。
話を戻すと、運動方程式の別の形として
$$
\begin{aligned}
\frac{\diff}{\diff t} \left( m\vec{v}\right) = \vec{F}
\end{aligned}
$$
と記述されます。
微分の中身「 $m\vec{v}$ 」を「運動量 $\vec{p}$ 」と呼びます。
運動量 $m\vec{v}$ を $\vec{p}$ と書き換えると
$$
\begin{aligned}
\frac{\diff \vec{p}}{\diff t} = \vec{F}
\end{aligned}
$$
となります。
左辺 $\displaystyle \frac{\diff \vec{p}}{\diff t}$ は「単位時間当たりの運動量の変化」を表しています。
(ベクトルなので向きも含めて変化します)
$$
\begin{aligned}
\diff \vec{p} = \vec{F} \diff t
\end{aligned}
$$
と変形すると、「$\diff \vec{p}$ は運動量の微小変化」を表し、「 $\vec{F} \diff t$ は力 $\vec{F}$ が微小時間 $\diff t$ 働いた」と言うことを表しています。
この「 $\vec{F} \diff t$ 」を「力積 $\vec{I}$ 」と呼びます。
点$\text{AB}$間は全時間に対する和になるので
$$
\begin{aligned}
\int \frac{\diff \vec{p}}{\diff t}\ \diff t =\int \vec{F}\ \diff t\\
\\
\int \diff \vec{p} = \int \vec{F} \diff t
\end{aligned}
$$
の積分を計算することになります。
初期条件は
$t=t_A$ で $v(t_A)=v_A ,\ \vec{p}(t_A) =\vec{p}_A$
$t=t_B$ で $v(t_B)=v_B ,\ \vec{p}(t_B) =\vec{p}_B$
とすると
$$
\begin{aligned}
\int_{t_A}^{t_B} \frac{\diff \vec{p}}{\diff t}\ \diff t =\int_{t_A}^{t_B} \vec{F}\ \diff t\\
\\
\int_{\vec{p}(t_A)}^{\vec{p}(t_B)} \diff \vec{p} = \int_{t_A}^{t_B} \vec{F} \diff t \\
\\
\Bigl[ \vec{p}\Bigr]_{\vec{p}_A}^{\vec{p}_B}= \int_{t_A}^{t_B} \vec{F} \diff t \\
\\
\vec{p}_B - \vec{p}_A = \int_{t_A}^{t_B} \vec{F} \diff t \\
\end{aligned}
$$
となります。(左辺は $\diff \vec{p}$ の積分なので、そのまま $\vec{p}$ の差になる)
左辺は「運動量の変化量 $\Delta \vec{p}$ 」を表し、右辺は「受けた力積の総和 $\vec{I}$ 」を表しています。
力積 $\displaystyle \int \vec{F} \diff t$ の計算は $\vec{F}$ が複雑な場合、積分で直接求めることは困難になります。
話を簡単にするために$1$次元として $F-t$ グラフを考えると
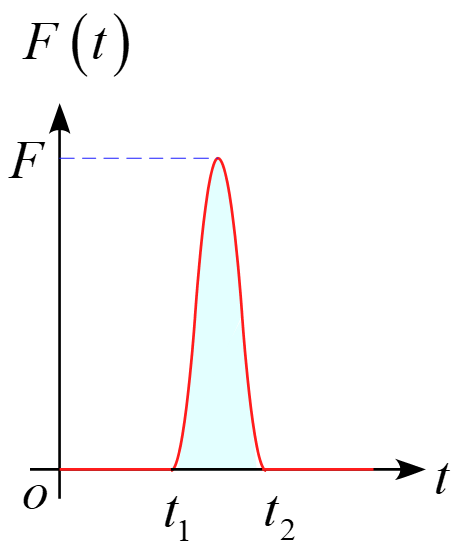
となります。$\displaystyle \int \vec{F} \diff t$ はこの図の水色の部分の面積に相当します。
この面積の計算は困難になります。
(厳密には、$\vec{F}$ の各成分について $F_x-t , F_y-t , F_z-t$ の面積)
従って、多くの場合は「運動量の変化量 $\Delta \vec{p}$ から力積 $\vec{I}$ を算出する」ことになります。
力積 $\vec{I}$ と運動量 $\vec{p}$ の物理量としての次元は
力積 $\vec{I}=\displaystyle \int \vec{F} \diff t$ については
$$
\begin{aligned}
\left[ \displaystyle \frac{ML}{T^2} \right] \left[ T \right] = \left[ \displaystyle \frac{ML}{T} \right]\\
\end{aligned}
$$
となります。
運動量 $\vec{p} =m\vec{v}$ については
$$
\begin{aligned}
\left[ M \right] \left[ \displaystyle \frac{L}{T} \right] = \left[ \displaystyle \frac{ML}{T} \right]\\
\end{aligned}
$$
となります。
従って、「力積 $\vec{I}$ と運動量 $\vec{p}$ の次元が等しい」ことが判ります。
力積 $\vec{I}$ と運動量 $\vec{p}$ の単位は
$$
\begin{aligned}
\text{N s}=\text{kg}\ \text{m} / \text{s}^2 \cdot \text{s} = \text{kg}\ \text{m} / \text{s}\\
\\
\text{kg}\cdot \text{m} / \text{s} =\ \text{kg}\ \text{m} / \text{s}
\end{aligned}
$$
となります。
運動エネルギー $K$ と運動量 $\vec{p}$ の比較
ここで、以前に扱った「仕事とエネルギーの関係式」と比較してみましょう。
- 仕事とエネルギーの関係式
$$
\begin{aligned}
\frac{1}{2} mv_B^2 -\frac{1}{2} mv_A^2 &=\int_{\text{A}}^{\text{B}} \vec{F} \cdot \diff \vec{r} \\
\end{aligned}
$$
- 力積と運動量の関係式
$$
\begin{aligned}
\vec{p}_B - \vec{p}_A = \int_{t_A}^{t_B} \vec{F} \diff t \\
\end{aligned}
$$
左辺の運動エネルギーや運動量は「運動状態の量的な大きさを表す物理量」になります。
運動方程式の「距離積分」を行うと、「仕事とエネルギーの関係式」が導かれます。
運動エネルギー $K$ は「速度の大きさに感度が高い物理量 ( $\propto v^2$)」であり、仕事 $W$ は「変位に沿う成分が効く物理量 ( $\vec{F}\cdot \diff r$ )」になります。
また、運動エネルギーの変化 $\Delta K$ は仕事に原因があると言えます。
一方、運動方程式の「時間積分」を行うと、「力積と運動量の関係式」が導かれます。
運動量 $\vec{p}$ は「速度の向きを含めた運動の勢いを表す物理量 ( $\propto v$)」であり、力積 $\vec{I}$ は「時間的に押した効果の蓄積を表す物理量 ( $\vec{F}\ \diff t$ )」になります。
また、運動量の変化 $\Delta \vec{p}$ は力積に原因があると言えます。 (外力が時間的に与えた効果)
だから「運動方程式を距離で積分するとエネルギー」、「運動方程式を時間で積分すると運動量」が出ることになります。
運動量保存則
力積と運動量の関係式
$$
\begin{aligned}
\vec{p}_B - \vec{p}_A = \int_{t_A}^{t_B} \vec{F} \diff t \\
\\
m\vec{v}_B - m\vec{v}_A = \int_{t_A}^{t_B} \vec{F} \diff t \\
\end{aligned}
$$
において、左辺の「運動量変化 $\Delta \vec{p}$ が $\vec{0}$ 」であれば「運動量保存」が成り立ちます。
即ち、「外力 $\vec{F}$ が働かなければ、系の全運動量は変化しない」となります。
ここでは質点が複数ある質点系の場合について検討していきます。
話を簡単にするために、系として $3$ つの質点を考えるとします。
それぞれの質量 $m_1 ,m_2 , m_3$ をとし、それぞれの質点に働く外力を $\vec{F}_1 ,\vec{F}_2 , \vec{F}_3$ とし、
それぞれの質点間に働く力を $\vec{F}_{12},\vec{F}_{21},\vec{F}_{13},\vec{F}_{31},\vec{F}_{23},\vec{F}_{32}$ とします。($\vec{F}_{12}$ は$1$が$2$から受ける力の意)
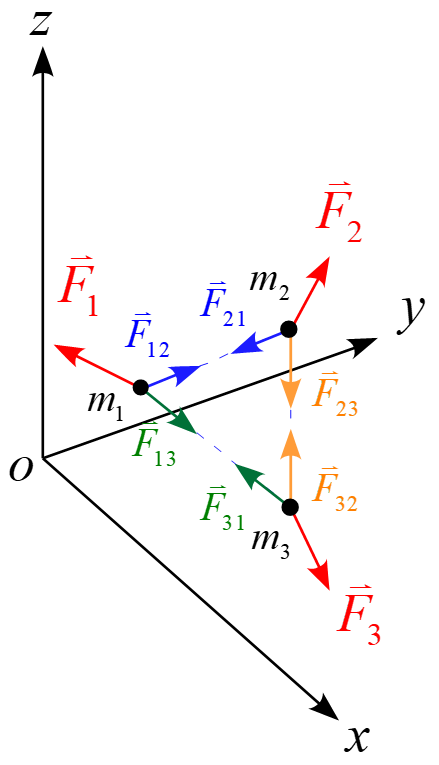
図の様に、それぞれの質点には「他の$2$つの質点からの力」と「外力」の$3$つの力が作用していると考えます。
さらに、それぞれの運動量をとしたとき、運動方程式は
$$
\begin{aligned}
\frac{\diff \vec{p}_1}{\diff t}=\vec{F}_1 +\vec{F}_{12} +\vec{F}_{13}\\
\\
\frac{\diff \vec{p}_2}{\diff t}=\vec{F}_2 +\vec{F}_{21} +\vec{F}_{23}\\
\\
\frac{\diff \vec{p}_3}{\diff t}=\vec{F}_3 +\vec{F}_{31} +\vec{F}_{32}\\
\end{aligned}
$$
と表されます。
ここでそれぞれの質点間に作用する力は作用反作用の法則により
$$
\begin{aligned}
\vec{F}_{12} &= -\vec{F}_{21} \\
\\
\vec{F}_{13} &= -\vec{F}_{31} \\
\\
\vec{F}_{23} &= -\vec{F}_{32} \\
\end{aligned}
$$
と表されるので、前述の$3$式の和を取ると
$$
\begin{aligned}
\frac{\diff \vec{p}_1}{\diff t} +
\frac{\diff \vec{p}_2}{\diff t} +
\frac{\diff \vec{p}_3}{\diff t} &=
\vec{F}_1 +\vec{F}_{12} +\vec{F}_{13} +
\vec{F}_2 +\vec{F}_{21} +\vec{F}_{23} +
\vec{F}_3 +\vec{F}_{31} +\vec{F}_{32} \\
\\
\frac{\diff}{\diff t} \left( \vec{p}_1+ \vec{p}_2 + \vec{p}_3 \right) &=
\vec{F}_1 + \vec{F}_2 + \vec{F}_3
\end{aligned}
$$
となり、内力は打ち消し合い、外力のみが残る結果となります。
ここで、この式を $n$ 個の質点系まで拡張すると
$$
\begin{aligned}
\frac{\diff}{\diff t} \left( \vec{p}_1+ \vec{p}_2 + \vec{p}_3 + \cdots + \vec{p}_n \right) &=
\vec{F}_1 + \vec{F}_2 + \vec{F}_3 + \cdots + \vec{F}_n \\
\\
\frac{\diff}{\diff t} \sum \vec{p}_i &= \sum \vec{F}_i
\end{aligned}
$$
となります。
系の全運動量 $\vec{P}$ を $\vec{P}=\sum_i \vec{p}_i$ とすると
$$
\begin{aligned}
\frac{\diff \vec{P}}{\diff t} &= \sum_i \vec{F}_i
\end{aligned}
$$
と表されます。
この結果により
「この質点系の全運動量の変化は外力の総和によるものである。」
「外力が無い場合は内力が作用していても全運動量は変化しない。」
と言うことができます。
これが「運動量保存則の意味」になります。
反発係数
$1$次元の衝突のモデルにおいて
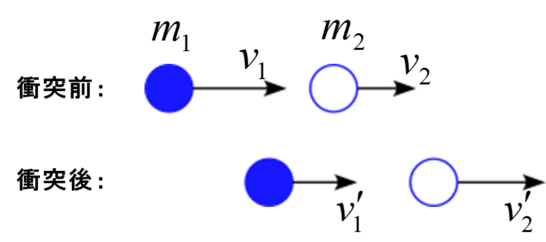
運動量保存則より
$$
\begin{aligned}
m_1 v_1 + m_2 v_2 = m_1 v'_1 + m_2 v'_2
\end{aligned}
$$
が成立する。
しかし、これだけでは速度の情報が不十分である。
そこで
「同じ$2$物体の衝突では衝突前後の相対速度の大きさの比は一定」
という経験的法則を導入し、その比率を「反発係数 (跳ね返り係数) $e$」と定義すると
$$
\begin{aligned}
e =-\frac{v'_1-v'_2}{v_1-v_2}
\end{aligned}
$$
と表されます。(1次元で、同一直線上の速度(符号付き)として定義する)
マイナス符号は、衝突前後で相対速度の向きが反転することを反映しています。
ここで運動エネルギーについて検討するために$2$物体の衝突について考えてみましょう。
最終的には$2$体問題を“相対運動$1$体問題”に落とすために換算質量を導入します。
図の様な位置関係であるとします。
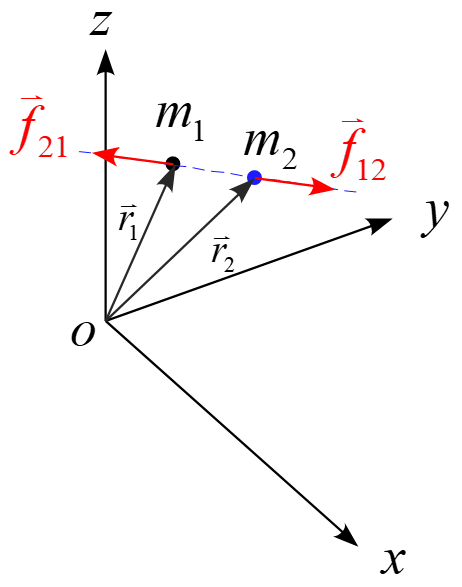
図の様に、衝突中に$2$物体が及ぼし合う接触力を $\vec{f}_{12}$ ($1$が$2$から受ける力)と記述します。
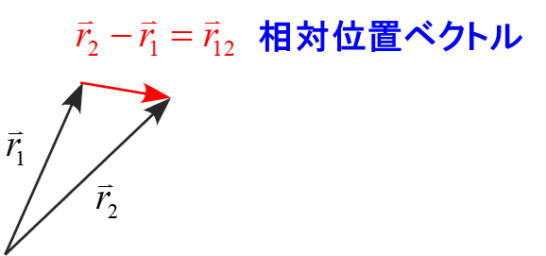
そして、図の様に相対位置ベクトル $\vec{r}_2 - \vec{r}_1= \vec{r}_{12}$ を設定します。
また、定義より $\vec{r}_{12}=-\vec{r}_{21}$ とします。
この衝突は$2$質点を結ぶ直線(衝突線)方向のみで起きるので、$\vec f_{12}$ も $\vec r_{12}$ 方向成分だけを考えると(実質$1$次元)
それぞれの質点に対して運動方程式は
$$
\begin{aligned}
m_1\frac{\diff^2 \vec{r}_1}{\diff t^2} =-\vec{f}_{12} \\
\\
m_2\frac{\diff^2 \vec{r}_2}{\diff t^2} =\vec{f}_{12}
\end{aligned}
$$
となります。
この$2$式において、相対位置ベクトルの形を作るためにそれぞれの式に質量$m_1, m_2$をかけて差を取る(質点$2-$質点$1$)と
$$
\begin{aligned}
m_1 m_2\frac{\diff^2 \vec{r}_1}{\diff t^2} &=-m_2 \vec{f}_{12} \\
\\
m_1 m_2\frac{\diff^2 \vec{r}_2}{\diff t^2} &=m_1 \vec{f}_{12} \\
\\
m_1 m_2\frac{\diff^2 \vec{r}_2}{\diff t^2} -
m_1 m_2\frac{\diff^2 \vec{r}_1}{\diff t^2} &= m_1 \vec{f}_{12} - (-m_2 \vec{f}_{12} ) \\
\\
m_1 m_2 \left( \frac{\diff^2 \vec{r}_2}{\diff t^2} -
\frac{\diff^2 \vec{r}_1}{\diff t^2}\right) &= m_1 \vec{f}_{12} + m_2 \vec{f}_{12} \\
\\
m_1 m_2 \frac{\diff^2 }{\diff t^2} \left( \vec{r}_2-\vec{r}_1 \right) &=
(m_1+m_2)\vec{f}_{12}
\end{aligned}
$$
となります。
ここで、$\vec{r}_{12} = \vec{r}_2 -\vec{r}_1$ と書き換えれば
$$
\begin{aligned}
m_1 m_2 \frac{\diff^2 \vec{r}_{12}}{\diff t^2} &= (m_1+m_2)\vec{f}_{12} \\
\\
\frac{m_1 m_2}{m_1+m_2}\frac{\diff^2 \vec{r}_{12}}{\diff t^2} &=\vec{f}_{12}
\end{aligned}
$$
となります。
この式は質量を
$$
\begin{aligned}
\mu =\frac{m_1 m_2}{m_1+m_2}
\end{aligned}
$$
とした運動方程式と見なすことができます。
この質量 $\mu$ を「換算質量」と呼びます。
従って、$2$物体の相対運動を考え、その$2$物体の質量を換算質量 $\mu$ として考えると
ここで、$2$質点間を結ぶ直線上の衝突で$1$次元的運動と見なすので
$$
\begin{aligned}
(\vec{v}_{1} - \vec{v}_{2})^2 &=
(\vec{v}_{1} - \vec{v}_{2})\cdot (\vec{v}_{1} - \vec{v}_{2}) =
(v_{1} - v_{2})^2 \\
\\
(\vec{v}'_{1} - \vec{v}'_{2})^2 &=
(\vec{v}'_{1} - \vec{v}'_{2})\cdot (\vec{v}'_{1} - \vec{v}'_{2}) =
(v'_{1} - v'_{2})^2
\end{aligned}
$$
と表されます。
よって、この衝突での運動エネルギー変化 $\Delta K$ は
$$
\begin{aligned}
\Delta K &=
\frac{1}{2}\mu (v'_{1} - v'_{2})^2 -
\frac{1}{2}\mu (v_{1} - v_{2})^2 \\
\\
&= \frac{1}{2}\mu \left[ (v'_{1} - v'_{2})^2 - (v_{1} - v_{2})^2 \right] \\
\\
&= \frac{1}{2}\mu \left[ \left( -e(v_{1} - v_{2}) \right)^2 -
(v_{1} - v_{2})^2 \right] \\
\\
&= \frac{1}{2}\mu \left[ e^2(v_{1} - v_{2}) ^2 - (v_{1} - v_{2})^2 \right] \\
\\
&= \frac{1}{2}\mu (v_{1} - v_{2}) ^2 (e^2-1) \\
\\
&= \frac{1}{2} \frac{m_1 m_2}{m_1+m_2} (v_{1} - v_{2}) ^2 (e^2-1)
\\
\end{aligned}
$$
となります。
ここで $e^2-1$ に着目すると
反発係数 $e$ が $e=1$ となる時、$e^2-1=0$ となり、$\Delta K =0$ となります。
この時、衝突の前後でのエネルギーロスは無く「完全弾性衝突」となります。
「理想的に弾む衝突」などと表現する場合もあります。
通常の一般的な衝突では反発係数 $e$ は $0 \le e \le 1$ でありこれを「非弾性衝突」と呼びます。
反発係数 $e=0$ の場合は「完全非弾性衝突」となり、この時は$2$物体が一体となって運動している場合となります。
次は「モーメントと角運動量の関係式」を解説します。