次は実際のモデルとして「自由落下」と「おもりを持ち上げる運動」を解説します。
自由落下のモデル
質量 $m$ の物体が自由落下するモデルを考える。
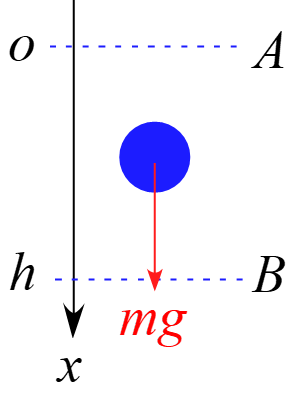
「下向きを正」に軸を設定すると運動方程式は
$$
\begin{aligned}
ma &=mg \\
\\
m \frac{\diff v}{\diff t} &=mg
\end{aligned}
$$
となります。(ここまでの手順は前述(内部link)を参照)
この運動方程式の両辺を $\diff x$ で積分し $\diff x = v \diff t \quad (\because \ \displaystyle v=\frac{\diff x}{\diff t})$ を用いて整理すると
$$
\begin{aligned}
\int m \frac{\diff v}{\diff t} \diff x &=\int mg \ \diff x\\
\\
\int m \frac{\diff v}{\diff t}\ v \diff t &=\int mg \ \diff x\\
\\
\int \frac{\diff}{\diff t} \left( \frac{1}{2} mv^2 \right)\ \diff t &=\int mg \ \diff x
\end{aligned}
$$
となります。
ここで初期条件として$\text{A,B}$点の時刻をそれぞれ $t_A, t_B$ とし
$$
\begin{aligned}
v(t_A) &=v_A=0\ ,\quad x(t_A) =x_A=0\\
\\
v(t_B) &=v_B=v\ , \quad x(t_B) =x_B=h\\
\end{aligned}
$$
と設定する ($h$ は落下距離) と、この積分は
$$
\begin{aligned}
\int_{t_A}^{t_B} \frac{\diff}{\diff t} \left( \frac{1}{2} mv^2 \right)\ \diff t &=\int_{x_A}^{x_B} mg\ \diff x
\end{aligned}
$$
となります。
よって
$$
\begin{aligned}
\left[ \frac{1}{2} mv^2 \right]_{v(t_A)}^{v(t_B)} &=\int_{x_A}^{x_B} mg\ \diff x\\
\\
\left[ \frac{1}{2} mv^2 \right]_{v_A}^{v_B} &=\displaystyle \biggl[ mgx \biggr]_{x_A}^{x_B}\\
\\
\frac{1}{2} mv_B^2 -\frac{1}{2} mv_A^2 &=mgx_B-mgx_A \\
\\
\frac{1}{2} mv_B^2 -\frac{1}{2} mv_A^2 &=mg(x_B-x_A)
\end{aligned}
$$
となり、これは「運動エネルギーの変化量 $\Delta K$」が「外力の仕事 $W$」に等しい形になっています。
ここで値を代入すると
$$
\begin{aligned}
\frac{1}{2} mv^2 -\frac{1}{2} m\cdot 0^2 &=mgh-mg\cdot 0 \\
\\
\frac{1}{2} mv^2 &= mgh
\end{aligned}
$$
と表されます。
この結果は所謂、「エネルギー保存則」を表している式になります。
別の形で表すと
$$
\begin{aligned}
\frac{1}{2} mv^2 + (-mgh) =0
\end{aligned}
$$
となり、「$\displaystyle \frac{1}{2}mv^2$」は「運動エネルギー $K$ 」を表し、「 $-mgh$ 」は「重力による位置エネルギー $U$ 」を表しています。この2つの和が「全力学的エネルギー $E$ 」となります。
ここでは $x$軸を「下向き正」に設定したので、重力による位置エネルギー $U$ は $U(x)=-mgx$ で表され、$U(h)=-mgh$ となります。
「自由落下の運動モデル」においては「全力学的エネルギー $E =$ 運動エネルギー $K +$ 位置エネルギー $U$ 」となり時間に依ってエネルギーの総和は変化しないことがわかります。
この結果を用いると
$$
\begin{aligned}
\frac{1}{2} mv^2 &= mgh \\
\\
v &=\sqrt{2gh}
\end{aligned}
$$
と計算できます。
おもりを持ち上げる運動のモデル
おもりを持ち上げる運動のモデルについて解説します。
質量 $m$ の物体を地表から高さ $h$ まで持ち上げるモデルを考えるとする。
軸を「上向き正」に設定して作図すると
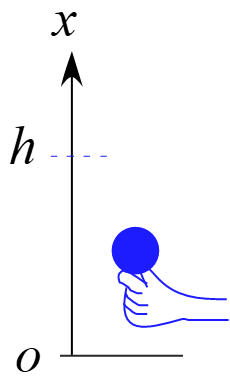
となります。
作用する力の矢印を書き込むと
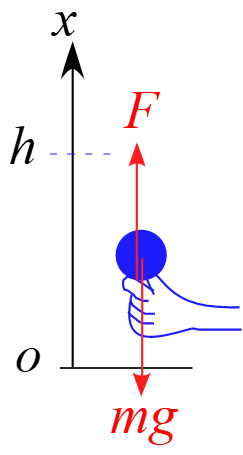
作用する力は「重力 $mg$」と「手の力 $F$」になります。
従って、運動方程式は
$$
\begin{aligned}
ma &=F-mg \\
\\
m \frac{\diff v}{\diff t} &=F-mg
\end{aligned}
$$
となります。
この運動方程式の両辺を $\diff x$ で積分し $\diff x = v \diff t \quad (\because \ \displaystyle v=\frac{\diff x}{\diff t})$ を用いて整理すると
$$
\begin{aligned}
\int m \frac{\diff v}{\diff t} \diff x &=\int (F-mg) \ \diff x\\
\\
\int m \frac{\diff v}{\diff t}\ v \diff t &=\int (F-mg) \ \diff x\\
\\
\int \frac{\diff}{\diff t} \left( \frac{1}{2} mv^2 \right)\ \diff t &=\int (F-mg) \ \diff x
\end{aligned}
$$
となります。
左辺は「運動エネルギーの変化量 $\Delta K$」を表し、右辺は「外力の仕事 $W$」を表しています。
ここで、この物体を持ち上げるとき「準静的」に持ち上げるとします。
即ち、
$t=0$ (開始時刻) で速度 $v_0 =0 ,\ x_0=0$
$t=T$ (高さ $h$ に達する時刻) で速度 $v_T=0 ,\ x_T=h$
となります。
「準静的」とは「静止に準ずる」という意味で、「速度 $v$ を限りなく $0$ に近い形での運動」を意味しています。
よって
$$
\begin{aligned}
\left[ \frac{1}{2} mv^2 \right]_{v_0}^{v_T} &=\int_{x_0}^{x_T} (F-mg)\ \diff x\\
\\
\left[ \frac{1}{2} mv^2 \right]_{0}^{0} &=\int_{0}^{h} (F-mg)\ \diff x\\
\\
0 &=\int_{0}^{h} (F-mg)\ \diff x\\
\\
0 &=\int_{0}^{h} F\ \diff x + \int_{0}^{h} (-mg)\ \diff x\\
\end{aligned}
$$
となります。
右辺の第1項は「手の力 $F$ による仕事」を表し、第2項は「重力 $mg$ による仕事」を表しています。
さらに式変形すると
$$
\begin{aligned}
\int_{0}^{h} mg\ \diff x &=\int_{0}^{h} F\ \diff x \\
\end{aligned}
$$
と表され、左辺は「重力 $mg$ による位置エネルギー」を右辺は「手の力 $F$ による仕事」を表しています。
従って
$$
\begin{aligned}
\displaystyle \biggl[ mgx \biggr]_{0}^{h} &=\int_{0}^{h} F\ \diff x \\
\\
mgh &=\int_{0}^{h} F\ \diff x \\
\end{aligned}
$$
となります。
これは「重力 $mg$ による位置エネルギー」が「手の力 $F$ による仕事」と等しいことがわかります。
この結果を考えると、「重力 $mg$ による位置エネルギー」は「重力 $mg$ に逆らって $h$ だけ持ち上げる仕事」に等しく、準静的 $F \simeq mg$ (ほぼ一定) である場合、その仕事は
$$
\begin{aligned}
W =F \cdot h =mgh
\end{aligned}
$$
となり、「この仕事によって物体は位置エネルギーを得た」と考えます。
エネルギー保存則
運動方程式から一般的にエネルギー保存則を検討してみましょう。
運動方程式は
$$
\begin{aligned}
ma &=F \\
\\
m \frac{\diff v}{\diff t} &=F
\end{aligned}
$$
と表されます。
ここで両辺に「速度 $\displaystyle v=\frac{\diff x}{\diff t}$ 」をかけると
$$
\begin{aligned}
m \frac{\diff v}{\diff t} v&=F \frac{\diff x}{\diff t}
\end{aligned}
$$
となります。「左辺には $v$ 」を「右辺には $\displaystyle \frac{\diff x}{\diff t}$ 」をかけています。
さらに式変形すると
$$
\begin{aligned}
m \frac{\diff v}{\diff t} v&=F \frac{\diff x}{\diff t} \\
\\
\frac{\diff}{\diff t}\left(\frac{1}{2}mv^2 \right) &=F \frac{\diff x}{\diff t}
\end{aligned}
$$
となります。
ここで1次元運動として $x$ 方向のみを考えるとする。
保存力であれば力 $F$ は $\displaystyle F(x)=-\frac{\diff U}{\diff x}$と記述できるので
$$
\begin{aligned}
\frac{\diff}{\diff t}\left(\frac{1}{2}mv^2 \right) &=F(x) \frac{\diff x}{\diff t} \\
\\
\frac{\diff}{\diff t}\left(\frac{1}{2}mv^2 \right) &=-\frac{\diff U}{\diff x} \frac{\diff x}{\diff t} =-\frac{\diff U}{\diff t}\\
\end{aligned}
$$
と表されるので
$$
\begin{aligned}
\frac{\diff}{\diff t}\left(\frac{1}{2}mv^2 \right) &= -\frac{\diff U}{\diff t} \\
\\
\frac{\diff}{\diff t}\left(\frac{1}{2}mv^2 \right) + \frac{\diff U}{\diff t} &=0\\
\\
\frac{\diff}{\diff t}\left(\frac{1}{2}mv^2 +U\right) &=0\\
\end{aligned}
$$
となります。
従って、運動エネルギー $K$ を使って表すと
$$
\begin{aligned}
\frac{\diff}{\diff t}\left(K+U \right) &=0\\
\end{aligned}
$$
となり、「全力学的エネルギーを時間 $t$ で微分すると $0$ 」を表しています。
従って、「エネルギー保存則が成立している」と言えます。
この計算の物理的意味を考えてみましょう。
「速度 $v$ は単位時間の変位」であり $\displaystyle v=\frac{\diff x}{\diff t}$ で定義されます。従って両辺に「 $\displaystyle v=\frac{\diff x}{\diff t}$ 」を掛ける操作は「単位時間当たりの仕事とエネルギーの関係 (仕事率)」を見ていることに対応します。
これを全時間に対して積分することは「最初と最後の仕事とエネルギーの関係式」を表すことになります。
この式を「エネルギー方程式」と呼びます。
エネルギー保存則の導出例
ここではエネルギー保存則の導出を紹介します。
「保存則」を示す方法はいくつかあります。
そもそも「保存」とはどういう意味でしょうか?
ここでの「保存」とは「時間的に変化しない」という意味になります。
「時間に依らない量」ということになります。
さて、この「時間的に変化しない」ということをどのように示すか紹介します。
- 計算する
「具体的に代入してみたら定数」あるいは「積分してみたら定数」
いずれも「計算してみたら定数が導けたケース」になります。
- $t$ の微分の形を作る
「 $t$ で微分したら $0$ になる」
「 $t$ で微分したら $0$ になる」と言うことは「微分する前の物理量は時間 $t$ に対して定数であるはず」と言う考え方です。
では、具体例をやってみましょう。
自由落下
軸は「上向きを正」に設定して作図をすると
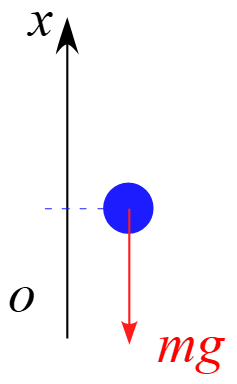
作用する力は「重力 $mg$ 」になるので、運動方程式は
$$
\begin{aligned}
ma &=-mg \\
\\
m \frac{\diff v}{\diff t} &= -mg
\end{aligned}
$$
となります。
両辺に速度 $\displaystyle v=\frac{\diff x}{\diff t}$ をかけると
$$
\begin{aligned}
m \frac{\diff v}{\diff t} v &= -mg \frac{\diff x}{\diff t}\\
\\
\frac{\diff}{\diff t} \left( \frac{1}{2} mv^2 \right) &= \frac{\diff}{\diff t} \left( -mgx \right) \\
\\
\frac{\diff}{\diff t} \left( \frac{1}{2} mv^2 + mgx \right) &= 0
\end{aligned}
$$
となります。ここでは「上向きを正」で表しています。
よって「 $\displaystyle \frac{1}{2}mv^2 +mgx$ は時間 $t$ に対して定数」であると言えます。
となり、「エネルギー保存則」が成立していると言えます。
バネの単振動 (床の摩擦力無し)
滑らかな床に置かれた質量 $m$ の物体にバネが壁から取り付けられているモデルを考える。
軸を「右向き正、上向き正」に設定し、作図をすると
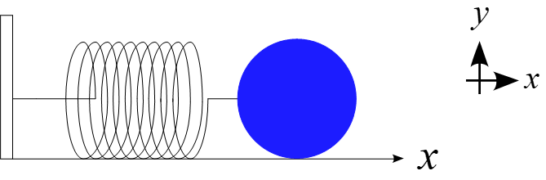
となります。
作用する力を書き込むと
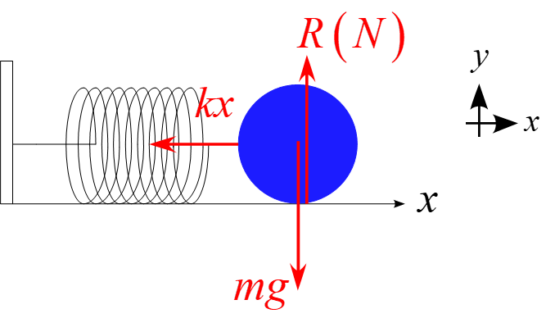
となります。
作用する力は「重力 $mg$ 」、「接触面からの抗力 $R(N)$ 」と「バネの弾性力 $kx$」になります。
「接触面からの抗力 $R(N)$ 」は滑らかな床なので摩擦力が作用せず「抗力 $R$ 」は傾かず鉛直上向きになります。
運動方程式は
$$
\begin{aligned}
ma_x &=-kx \\
\\
ma_y &=N-mg
\end{aligned}
$$
となります。
初期条件 $a_y=0$ (束縛条件)より
$$
\begin{aligned}
ma_x &=-kx \\
\\
0 &=N-mg
\end{aligned}
$$
となります。
$x$ 軸方向に着目し、両辺に速度 $\displaystyle v_x=\frac{\diff x}{\diff t}$ をかけると
$$
\begin{aligned}
ma_x &=-kx \\
\\
m \frac{\diff v_x}{\diff t} &=-kx \\
\\
m \frac{\diff v_x}{\diff t} v_x &=-kx \frac{\diff x}{\diff t} \\
\\
\frac{\diff}{\diff t} \left( \frac{1}{2} mv_x^2 \right)\ &=\frac{\diff}{\diff t} \left( -\frac{1}{2} kx^2 \right)\
\end{aligned}
$$
となり、左辺にまとめると
$$
\begin{aligned}
\frac{\diff}{\diff t} \left( \frac{1}{2} mv_x^2 \right)\ + \frac{\diff}{\diff t} \left( \frac{1}{2} kx^2 \right) =0 \\
\\
\frac{\diff}{\diff t} \left( \frac{1}{2} mv_x^2 + \frac{1}{2} kx^2 \right)\ =0 \\
\end{aligned}
$$
となります。
よって「 $\displaystyle \frac{1}{2}mv_x^2 + \frac{1}{2}kx^2$ は時間 $t$ に対して定数」であると言えます。
従って、「エネルギー保存則」が成立していると言えます。
保存力
質点を移動させ、再び元の位置に戻るまでにした全仕事の和が $0$ になる場合、そのような力のことを「保存力」と呼びます。
物体に働く力 $\vec{F}$ が物体の位置 $\vec{r}$ のみによって働く力が決まる場合を考えるとする。
このときの力は「 $\vec{F}(\vec{r})$ 」と表され、これを「場の力」と呼びます。
力の場の中で物体が動くとき、力のする仕事 $W$ は前述より
$$
\begin{aligned}
W =\int_C \vec{F}(\vec{r}) \cdot \diff \vec{r}
\end{aligned}
$$
と表されます。
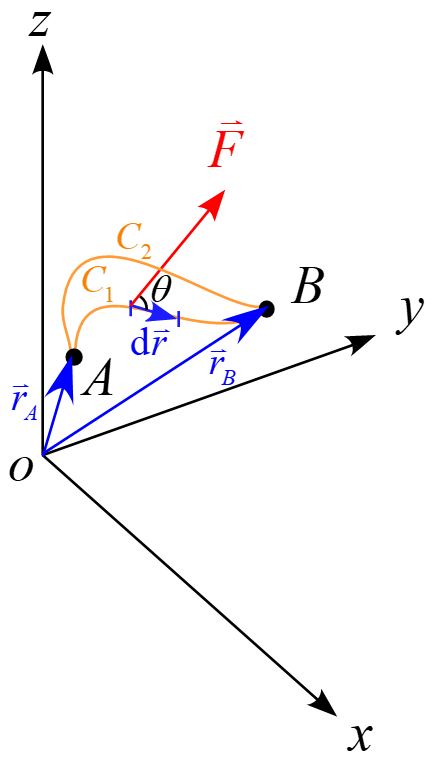
図のように力の場 $\vec{F}(\vec{r})$ の中で物体が点$\text{A}$から点$\text{B}$まで経路$C_A$に沿って動くとき、点$\text{A}$と点$\text{B}$の位置ベクトルを $\vec{r}_A, \vec{r}_B$ としてこの経路の仕事を考えると
$$
\begin{aligned}
W =\int_{\vec{r}_A}^{\vec{r}_B} \vec{F}(\vec{r}) \cdot \diff \vec{r}
\end{aligned}
$$
と表されます。
「保存力」の場合、物体が$2$点を結ぶ経路に沿って働くときの力がする仕事は途中の経路に依存しないので
$$
\begin{aligned}
W =\int_{C_1} \vec{F}(\vec{r}) \cdot \diff \vec{r} =\int_{C_2} \vec{F}(\vec{r}) \cdot \diff \vec{r}
\end{aligned}
$$
と表されます。
逆の見方をするとこの式が成り立つとき、作用している力は「保存力」であると言えます。
更に、「点$\text{A}$ $\to$ $C_1$ $\to$ 点$\text{B}$ $\to$ $C_2$ 」の経路を考えると
$$
\begin{aligned}
\oint \vec{F}(\vec{r}) \cdot \diff \vec{r} =
\int_{C_1} \vec{F}(\vec{r}) \cdot \diff \vec{r} + \left( -\int_{C_2} \vec{F}(\vec{r}) \cdot \diff \vec{r} \right) =0
\end{aligned}
$$
となり、「閉曲線積分が$0$」であることを表しています。
これは「$W_{A \to B}$」が経路に依存しないことを意味しています。
従って、保存力では位置エネルギー $U$ を定義できることになります。
その結果、保存力のみが作用するとき $K+U$ が保存されます。
次は「力積と運動量の関係式」を解説します。